 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRM-PRT: Realistic Robotic Manipulation Simulator and Benchmark with Progressive Reasoning Tasks
Jun 21, 2023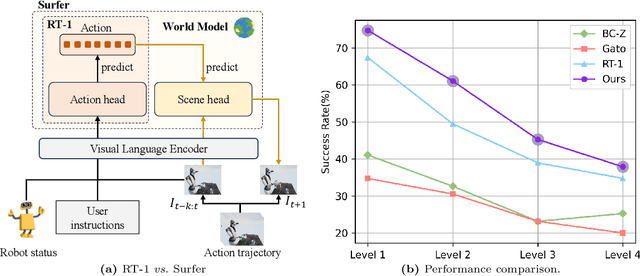
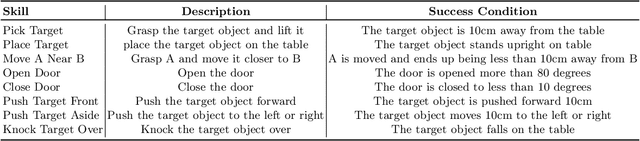
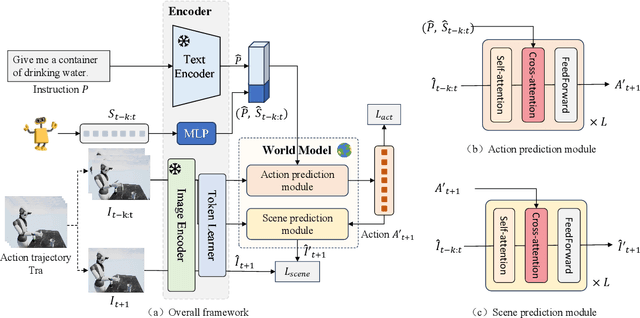
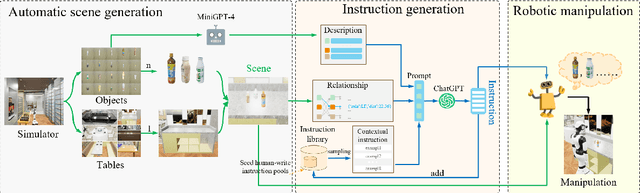
Recently, the advent of pre-trained large-scale language models (LLMs) like ChatGPT and GPT-4 have significantly advanced the machine's natural language understanding capabilities. This breakthrough has allowed us to seamlessly integrate these open-source LLMs into a unified robot simulator environment to help robots accurately understand and execute human natural language instructions. To this end, in this work, we introduce a realistic robotic manipulation simulator and build a Robotic Manipulation with Progressive Reasoning Tasks (RM-PRT) benchmark on this basis. Specifically, the RM-PRT benchmark builds a new high-fidelity digital twin scene based on Unreal Engine 5, which includes 782 categories, 2023 objects, and 15K natural language instructions generated by ChatGPT for a detailed evaluation of robot manipulation. We propose a general pipeline for the RM-PRT benchmark that takes as input multimodal prompts containing natural language instructions and automatically outputs actions containing the movement and position transitions. We set four natural language understanding tasks with progressive reasoning levels and evaluate the robot's ability to understand natural language instructions in two modes of adsorption and grasping. In addition, we also conduct a comprehensive analysis and comparison of the differences and advantages of 10 different LLMs in instruction understanding and generation quality. We hope the new simulator and benchmark will facilitate future research on language-guided robotic manipulation. Project website: https://necolizer.github.io/RM-PRT/ .
A Fog Robotic System for Dynamic Visual Servoing
Sep 16, 2018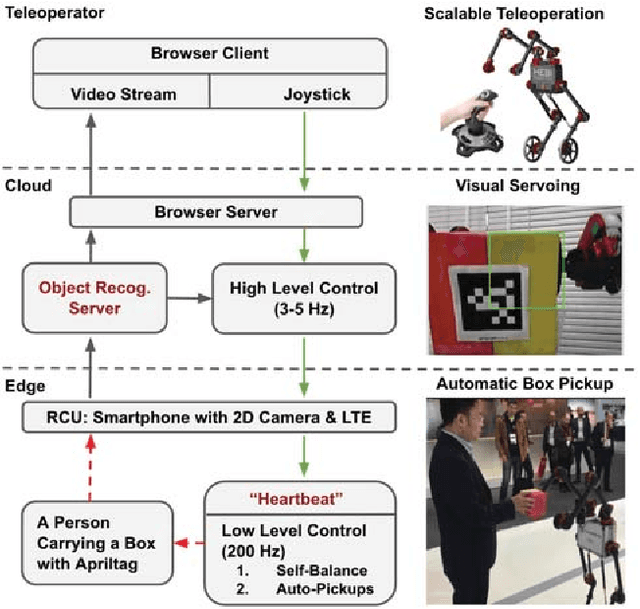
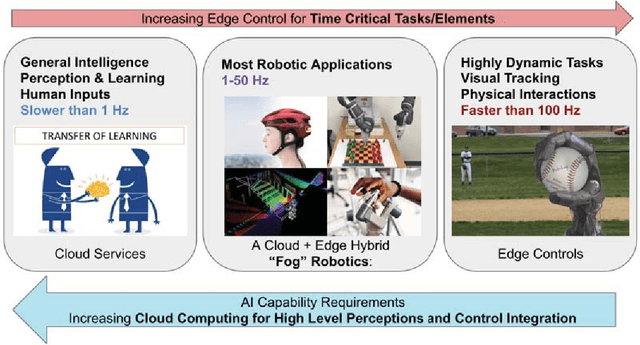
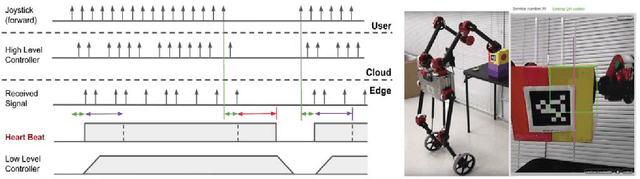
Cloud Robotics is a paradigm where distributed robots are connected to cloud services via networks to access unlimited computation power, at the cost of network communication. However, due to limitations such as network latency and variability, it is difficult to control dynamic, human compliant service robots directly from the cloud. In this work, by leveraging asynchronous protocol with a heartbeat signal, we combine cloud robotics with a smart edge device to build a Fog Robotic system. We use the system to enable robust teleoperation of a dynamic self-balancing robot from the cloud. We first use the system to pick up boxes from static locations, a task commonly performed in warehouse logistics. To make cloud teleoperation more efficient, we deploy image based visual servoing (IBVS) to perform box pickups automatically. Visual feedbacks, including apriltag recognition and tracking, are performed in the cloud to emulate a Fog Robotic object recognition system for IBVS. We demonstrate the feasibility of real-time dynamic automation system using this cloud-edge hybrid, which opens up possibilities of deploying dynamic robotic control with deep-learning recognition systems in Fog Robotics. Finally, we show that Fog Robotics enables the self-balancing service robot to pick up a box automatically from a person under unstructured environments.