 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFogROS2-FT: Fault Tolerant Cloud Robotics
Dec 06, 2024Cloud robotics enables robots to offload complex computational tasks to cloud servers for performance and ease of management. However, cloud compute can be costly, cloud services can suffer occasional downtime, and connectivity between the robot and cloud can be prone to variations in network Quality-of-Service (QoS). We present FogROS2-FT (Fault Tolerant) to mitigate these issues by introducing a multi-cloud extension that automatically replicates independent stateless robotic services, routes requests to these replicas, and directs the first response back. With replication, robots can still benefit from cloud computations even when a cloud service provider is down or there is low QoS. Additionally, many cloud computing providers offer low-cost spot computing instances that may shutdown unpredictably. Normally, these low-cost instances would be inappropriate for cloud robotics, but the fault tolerance nature of FogROS2-FT allows them to be used reliably. We demonstrate FogROS2-FT fault tolerance capabilities in 3 cloud-robotics scenarios in simulation (visual object detection, semantic segmentation, motion planning) and 1 physical robot experiment (scan-pick-and-place). Running on the same hardware specification, FogROS2-FT achieves motion planning with up to 2.2x cost reduction and up to a 5.53x reduction on 99 Percentile (P99) long-tail latency. FogROS2-FT reduces the P99 long-tail latency of object detection and semantic segmentation by 2.0x and 2.1x, respectively, under network slowdown and resource contention.
FogROS2-PLR: Probabilistic Latency-Reliability For Cloud Robotics
Oct 07, 2024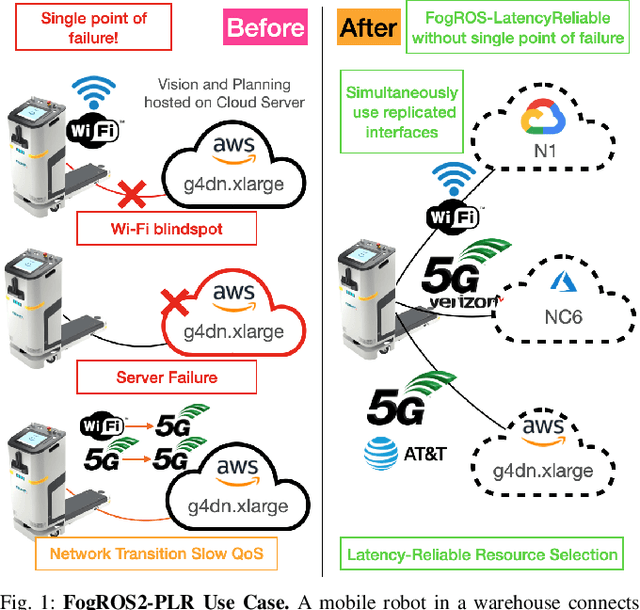
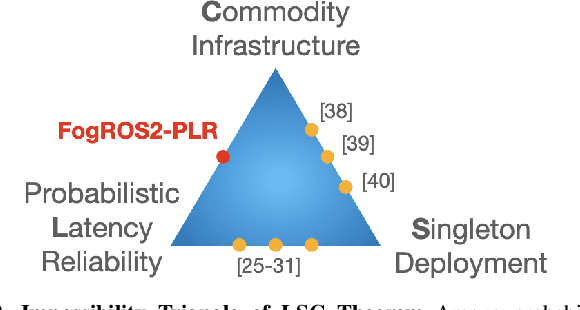
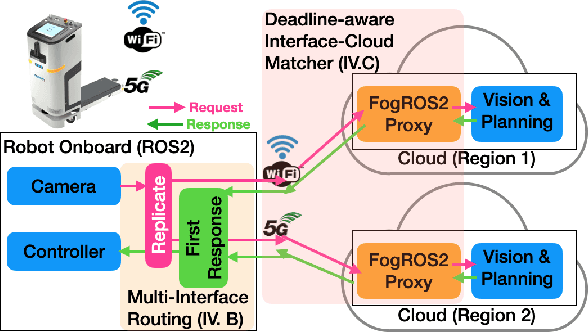
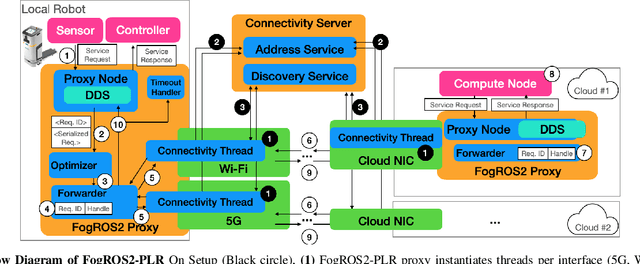
Cloud robotics enables robots to offload computationally intensive tasks to cloud servers for performance, cost, and ease of management. However, the network and cloud computing infrastructure are not designed for reliable timing guarantees, due to fluctuating Quality-of-Service (QoS). In this work, we formulate an impossibility triangle theorem for: Latency reliability, Singleton server, and Commodity hardware. The LSC theorem suggests that providing replicated servers with uncorrelated failures can exponentially reduce the probability of missing a deadline. We present FogROS2-Probabilistic Latency Reliability (PLR) that uses multiple independent network interfaces to send requests to replicated cloud servers and uses the first response back. We design routing mechanisms to discover, connect, and route through non-default network interfaces on robots. FogROS2-PLR optimizes the selection of interfaces to servers to minimize the probability of missing a deadline. We conduct a cloud-connected driving experiment with two 5G service providers, demonstrating FogROS2-PLR effectively provides smooth service quality even if one of the service providers experiences low coverage and base station handover. We use 99 Percentile (P99) latency to evaluate anomalous long-tail latency behavior. In one experiment, FogROS2-PLR improves P99 latency by up to 3.7x compared to using one service provider. We deploy FogROS2-PLR on a physical Stretch 3 robot performing an indoor human-tracking task. Even in a fully covered Wi-Fi and 5G environment, FogROS2-PLR improves the responsiveness of the robot reducing mean latency by 36% and P99 latency by 33%.
Lifelong LERF: Local 3D Semantic Inventory Monitoring Using FogROS2
Mar 15, 2024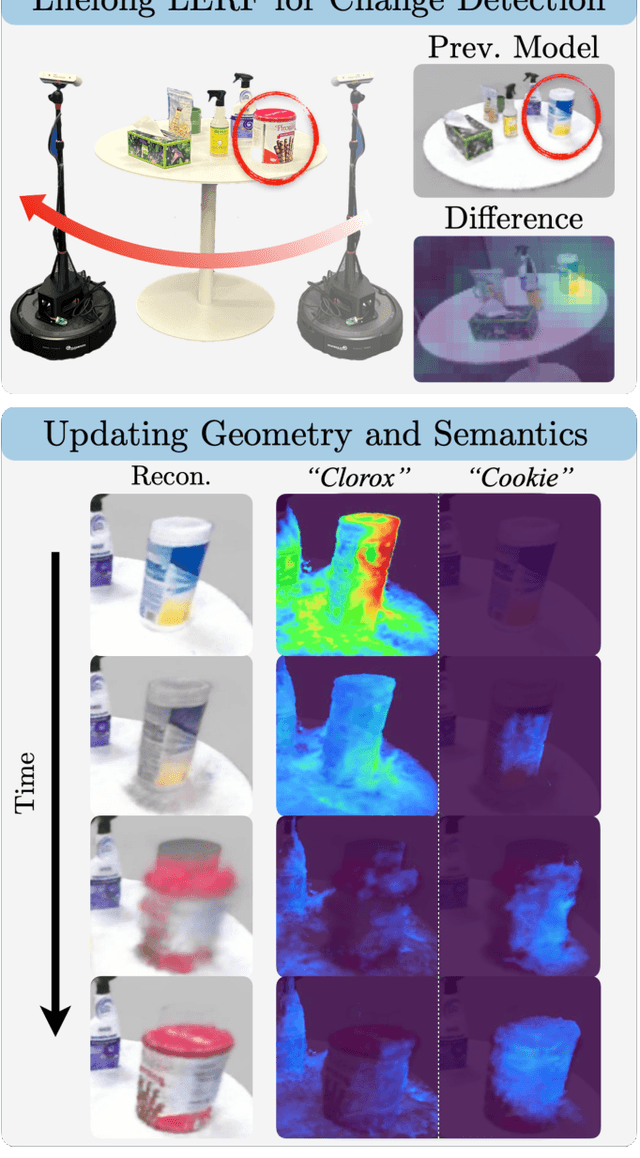
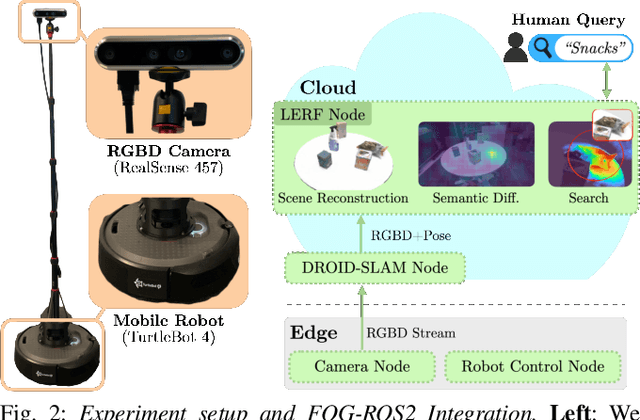
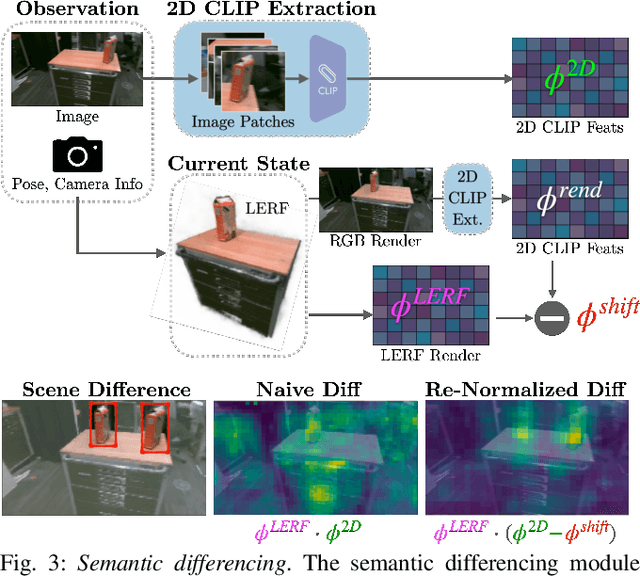
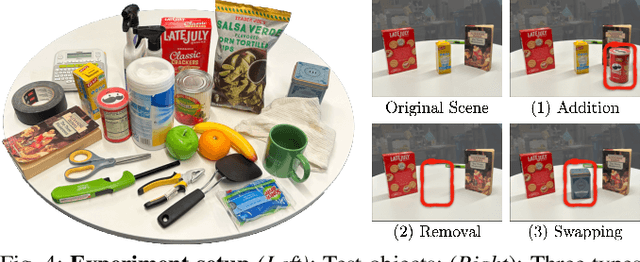
Inventory monitoring in homes, factories, and retail stores relies on maintaining data despite objects being swapped, added, removed, or moved. We introduce Lifelong LERF, a method that allows a mobile robot with minimal compute to jointly optimize a dense language and geometric representation of its surroundings. Lifelong LERF maintains this representation over time by detecting semantic changes and selectively updating these regions of the environment, avoiding the need to exhaustively remap. Human users can query inventory by providing natural language queries and receiving a 3D heatmap of potential object locations. To manage the computational load, we use Fog-ROS2, a cloud robotics platform, to offload resource-intensive tasks. Lifelong LERF obtains poses from a monocular RGBD SLAM backend, and uses these poses to progressively optimize a Language Embedded Radiance Field (LERF) for semantic monitoring. Experiments with 3-5 objects arranged on a tabletop and a Turtlebot with a RealSense camera suggest that Lifelong LERF can persistently adapt to changes in objects with up to 91% accuracy.
A Fog Robotic System for Dynamic Visual Servoing
Sep 16, 2018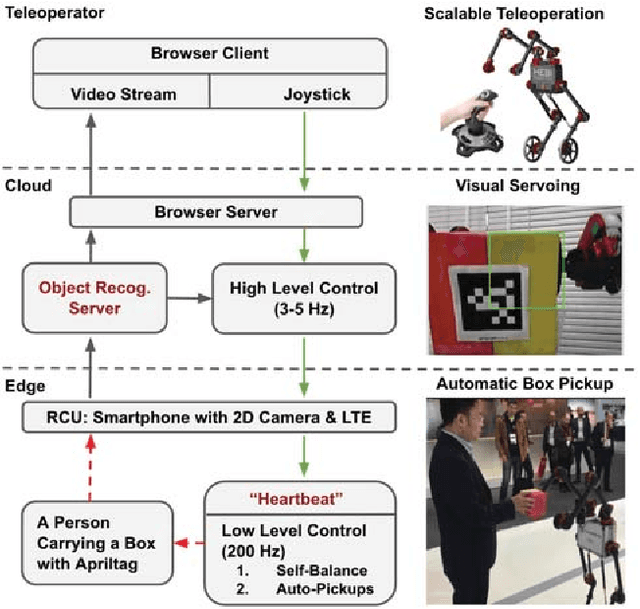
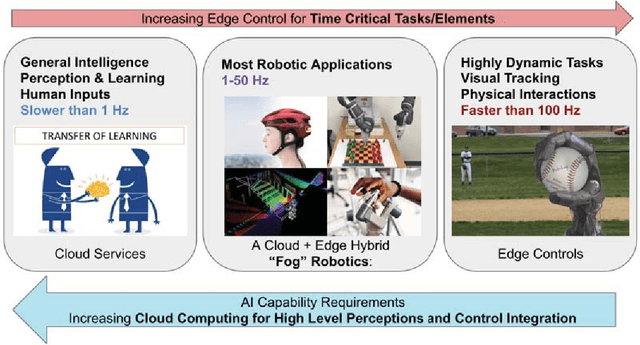
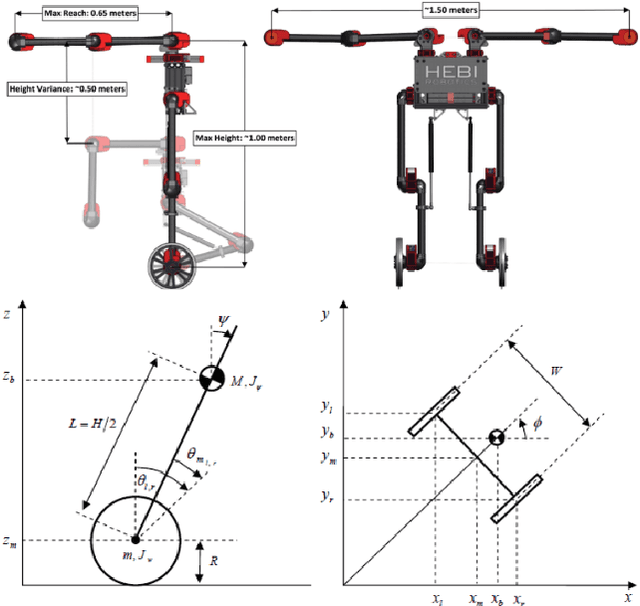
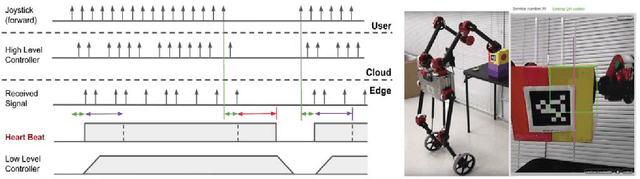
Cloud Robotics is a paradigm where distributed robots are connected to cloud services via networks to access unlimited computation power, at the cost of network communication. However, due to limitations such as network latency and variability, it is difficult to control dynamic, human compliant service robots directly from the cloud. In this work, by leveraging asynchronous protocol with a heartbeat signal, we combine cloud robotics with a smart edge device to build a Fog Robotic system. We use the system to enable robust teleoperation of a dynamic self-balancing robot from the cloud. We first use the system to pick up boxes from static locations, a task commonly performed in warehouse logistics. To make cloud teleoperation more efficient, we deploy image based visual servoing (IBVS) to perform box pickups automatically. Visual feedbacks, including apriltag recognition and tracking, are performed in the cloud to emulate a Fog Robotic object recognition system for IBVS. We demonstrate the feasibility of real-time dynamic automation system using this cloud-edge hybrid, which opens up possibilities of deploying dynamic robotic control with deep-learning recognition systems in Fog Robotics. Finally, we show that Fog Robotics enables the self-balancing service robot to pick up a box automatically from a person under unstructured environments.