 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Fog Robotic System for Dynamic Visual Servoing
Sep 16, 2018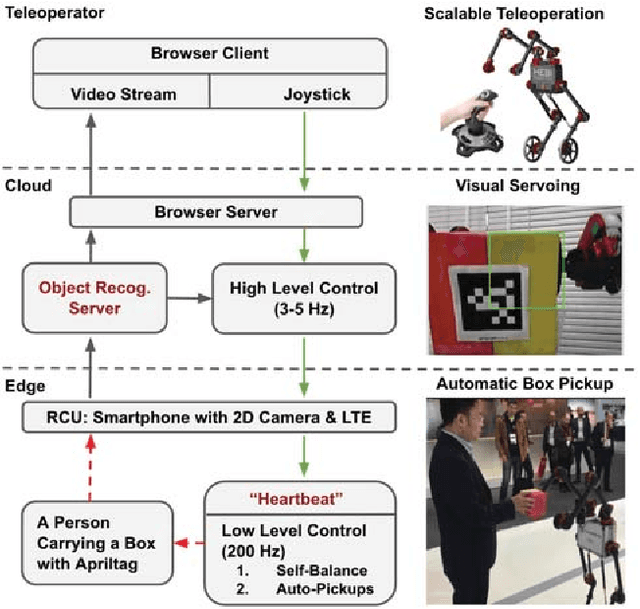
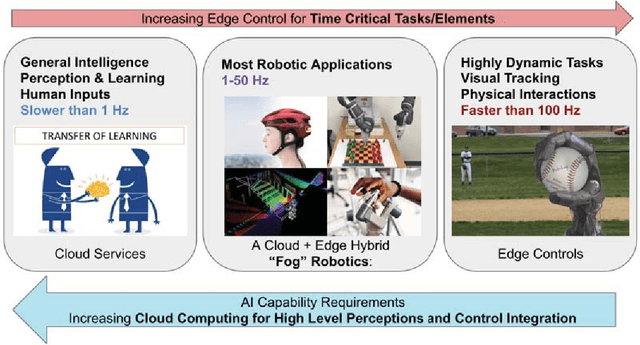
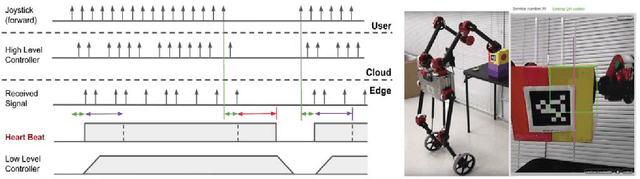
Cloud Robotics is a paradigm where distributed robots are connected to cloud services via networks to access unlimited computation power, at the cost of network communication. However, due to limitations such as network latency and variability, it is difficult to control dynamic, human compliant service robots directly from the cloud. In this work, by leveraging asynchronous protocol with a heartbeat signal, we combine cloud robotics with a smart edge device to build a Fog Robotic system. We use the system to enable robust teleoperation of a dynamic self-balancing robot from the cloud. We first use the system to pick up boxes from static locations, a task commonly performed in warehouse logistics. To make cloud teleoperation more efficient, we deploy image based visual servoing (IBVS) to perform box pickups automatically. Visual feedbacks, including apriltag recognition and tracking, are performed in the cloud to emulate a Fog Robotic object recognition system for IBVS. We demonstrate the feasibility of real-time dynamic automation system using this cloud-edge hybrid, which opens up possibilities of deploying dynamic robotic control with deep-learning recognition systems in Fog Robotics. Finally, we show that Fog Robotics enables the self-balancing service robot to pick up a box automatically from a person under unstructured environments.