 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLoop Closure Detection
Loop closure detection is the process of identifying previously visited locations in robot navigation or SLAM systems.
Papers and Code
Real-Time Loop Closure Detection in Visual SLAM via NetVLAD and Faiss
Feb 02, 2026Loop closure detection (LCD) is a core component of simultaneous localization and mapping (SLAM): it identifies revisited places and enables pose-graph constraints that correct accumulated drift. Classic bag-of-words approaches such as DBoW are efficient but often degrade under appearance change and perceptual aliasing. In parallel, deep learning-based visual place recognition (VPR) descriptors (e.g., NetVLAD and Transformer-based models) offer stronger robustness, but their computational cost is often viewed as a barrier to real-time SLAM. In this paper, we empirically evaluate NetVLAD as an LCD module and compare it against DBoW on the KITTI dataset. We introduce a Fine-Grained Top-K precision-recall curve that better reflects LCD settings where a query may have zero or multiple valid matches. With Faiss-accelerated nearestneighbor search, NetVLAD achieves real-time query speed while improving accuracy and robustness over DBoW, making it a practical drop-in alternative for LCD in SLAM.
VGGT-SLAM 2.0: Real time Dense Feed-forward Scene Reconstruction
Jan 27, 2026We present VGGT-SLAM 2.0, a real time RGB feed-forward SLAM system which substantially improves upon VGGT-SLAM for incrementally aligning submaps created from VGGT. Firstly, we remove high-dimensional 15-degree-of-freedom drift and planar degeneracy from VGGT-SLAM by creating a new factor graph design while still addressing the reconstruction ambiguity of VGGT given unknown camera intrinsics. Secondly, by studying the attention layers of VGGT, we show that one of the layers is well suited to assist in image retrieval verification for free without additional training, which enables both rejecting false positive matches and allows for completing more loop closures. Finally, we conduct a suite of experiments which includes showing VGGT-SLAM 2.0 can easily be adapted for open-set object detection and demonstrating real time performance while running online onboard a ground robot using a Jetson Thor. We also test in environments ranging from cluttered indoor apartments and office scenes to a 4,200 square foot barn, and we also demonstrate VGGT-SLAM 2.0 achieves the highest accuracy on the TUM dataset with about 23 percent less pose error than VGGT-SLAM. Code will be released upon publication.
Keyframe-based Dense Mapping with the Graph of View-Dependent Local Maps
Jan 13, 2026In this article, we propose a new keyframe-based mapping system. The proposed method updates local Normal Distribution Transform maps (NDT) using data from an RGB-D sensor. The cells of the NDT are stored in 2D view-dependent structures to better utilize the properties and uncertainty model of RGB-D cameras. This method naturally represents an object closer to the camera origin with higher precision. The local maps are stored in the pose graph which allows correcting global map after loop closure detection. We also propose a procedure that allows merging and filtering local maps to obtain a global map of the environment. Finally, we compare our method with Octomap and NDT-OM and provide example applications of the proposed mapping method.
InsSo3D: Inertial Navigation System and 3D Sonar SLAM for turbid environment inspection
Jan 09, 2026This paper presents InsSo3D, an accurate and efficient method for large-scale 3D Simultaneous Localisation and Mapping (SLAM) using a 3D Sonar and an Inertial Navigation System (INS). Unlike traditional sonar, which produces 2D images containing range and azimuth information but lacks elevation information, 3D Sonar produces a 3D point cloud, which therefore does not suffer from elevation ambiguity. We introduce a robust and modern SLAM framework adapted to the 3D Sonar data using INS as prior, detecting loop closure and performing pose graph optimisation. We evaluated InsSo3D performance inside a test tank with access to ground truth data and in an outdoor flooded quarry. Comparisons to reference trajectories and maps obtained from an underwater motion tracking system and visual Structure From Motion (SFM) demonstrate that InsSo3D efficiently corrects odometry drift. The average trajectory error is below 21cm during a 50-minute-long mission, producing a map of 10m by 20m with a 9cm average reconstruction error, enabling safe inspection of natural or artificial underwater structures even in murky water conditions.
Geometric Multi-Session Map Merging with Learned Local Descriptors
Dec 30, 2025Multi-session map merging is crucial for extended autonomous operations in large-scale environments. In this paper, we present GMLD, a learning-based local descriptor framework for large-scale multi-session point cloud map merging that systematically aligns maps collected across different sessions with overlapping regions. The proposed framework employs a keypoint-aware encoder and a plane-based geometric transformer to extract discriminative features for loop closure detection and relative pose estimation. To further improve global consistency, we include inter-session scan matching cost factors in the factor-graph optimization stage. We evaluate our framework on the public datasets, as well as self-collected data from diverse environments. The results show accurate and robust map merging with low error, and the learned features deliver strong performance in both loop closure detection and relative pose estimation.
Loop Closure using AnyLoc Visual Place Recognition in DPV-SLAM
Jan 06, 2026Loop closure is crucial for maintaining the accuracy and consistency of visual SLAM. We propose a method to improve loop closure performance in DPV-SLAM. Our approach integrates AnyLoc, a learning-based visual place recognition technique, as a replacement for the classical Bag of Visual Words (BoVW) loop detection method. In contrast to BoVW, which relies on handcrafted features, AnyLoc utilizes deep feature representations, enabling more robust image retrieval across diverse viewpoints and lighting conditions. Furthermore, we propose an adaptive mechanism that dynamically adjusts similarity threshold based on environmental conditions, removing the need for manual tuning. Experiments on both indoor and outdoor datasets demonstrate that our method significantly outperforms the original DPV-SLAM in terms of loop closure accuracy and robustness. The proposed method offers a practical and scalable solution for enhancing loop closure performance in modern SLAM systems.
Managing Ambiguity: A Proof of Concept of Human-AI Symbiotic Sense-making based on Quantum-Inspired Cognitive Mechanism of Rogue Variable Detection
Dec 17, 2025Organizations increasingly operate in environments characterized by volatility, uncertainty, complexity, and ambiguity (VUCA), where early indicators of change often emerge as weak, fragmented signals. Although artificial intelligence (AI) is widely used to support managerial decision-making, most AI-based systems remain optimized for prediction and resolution, leading to premature interpretive closure under conditions of high ambiguity. This creates a gap in management science regarding how human-AI systems can responsibly manage ambiguity before it crystallizes into error or crisis. This study addresses this gap by presenting a proof of concept (PoC) of the LAIZA human-AI augmented symbiotic intelligence system and its patented process: Systems and Methods for Quantum-Inspired Rogue Variable Modeling (QRVM), Human-in-the-Loop Decoherence, and Collective Cognitive Inference. The mechanism operationalizes ambiguity as a non-collapsed cognitive state, detects persistent interpretive breakdowns (rogue variables), and activates structured human-in-the-loop clarification when autonomous inference becomes unreliable. Empirically, the article draws on a three-month case study conducted in 2025 within the AI development, involving prolonged ambiguity surrounding employee intentions and intellectual property boundaries. The findings show that preserving interpretive plurality enabled early scenario-based preparation, including proactive patent protection, allowing decisive and disruption-free action once ambiguity collapsed. The study contributes to management theory by reframing ambiguity as a first-class construct and demonstrates the practical value of human-AI symbiosis for organizational resilience in VUCA environments.
Multi-modal Loop Closure Detection with Foundation Models in Severely Unstructured Environments
Nov 07, 2025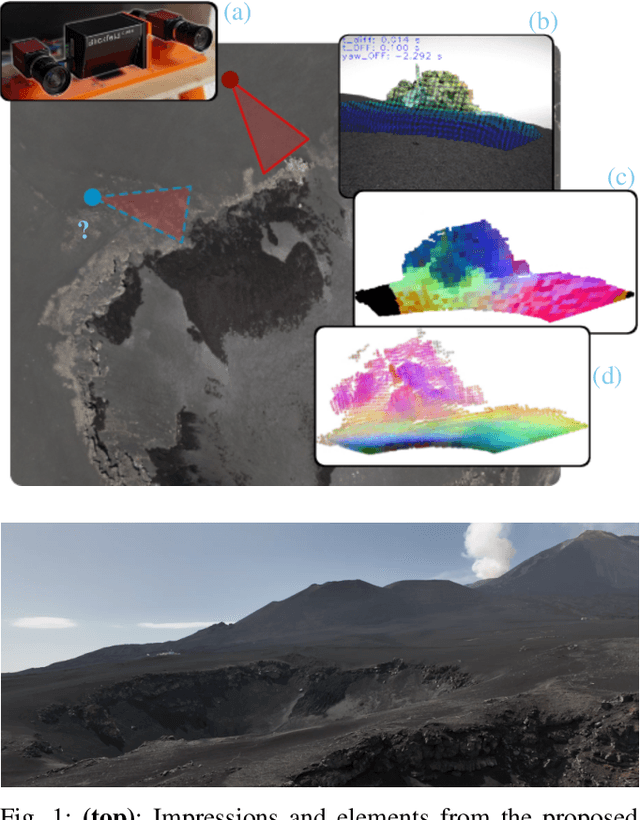
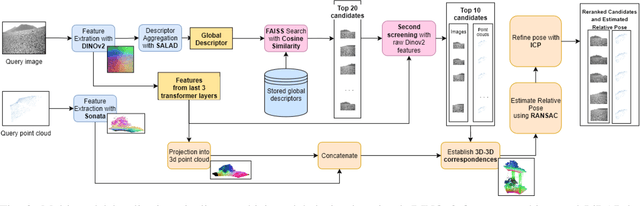
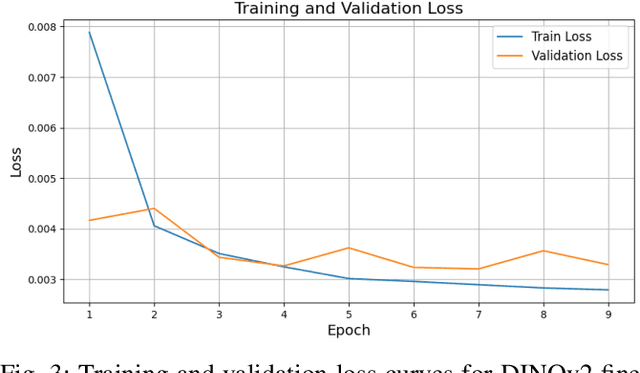
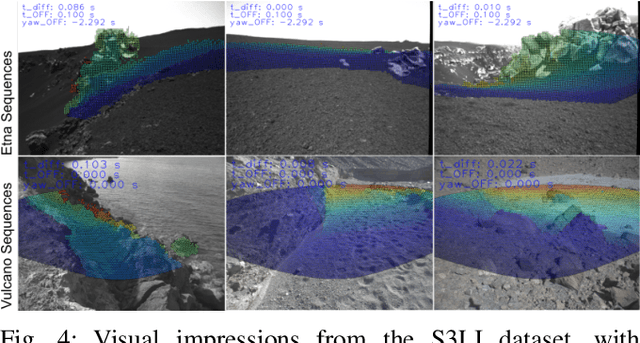
Robust loop closure detection is a critical component of Simultaneous Localization and Mapping (SLAM) algorithms in GNSS-denied environments, such as in the context of planetary exploration. In these settings, visual place recognition often fails due to aliasing and weak textures, while LiDAR-based methods suffer from sparsity and ambiguity. This paper presents MPRF, a multimodal pipeline that leverages transformer-based foundation models for both vision and LiDAR modalities to achieve robust loop closure in severely unstructured environments. Unlike prior work limited to retrieval, MPRF integrates a two-stage visual retrieval strategy with explicit 6-DoF pose estimation, combining DINOv2 features with SALAD aggregation for efficient candidate screening and SONATA-based LiDAR descriptors for geometric verification. Experiments on the S3LI dataset and S3LI Vulcano dataset show that MPRF outperforms state-of-the-art retrieval methods in precision while enhancing pose estimation robustness in low-texture regions. By providing interpretable correspondences suitable for SLAM back-ends, MPRF achieves a favorable trade-off between accuracy, efficiency, and reliability, demonstrating the potential of foundation models to unify place recognition and pose estimation. Code and models will be released at github.com/DLR-RM/MPRF.
Semi-distributed Cross-modal Air-Ground Relative Localization
Nov 10, 2025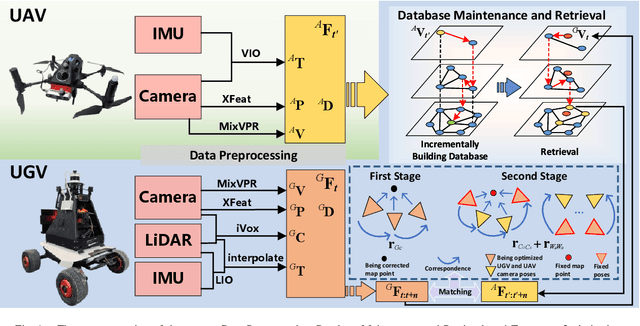
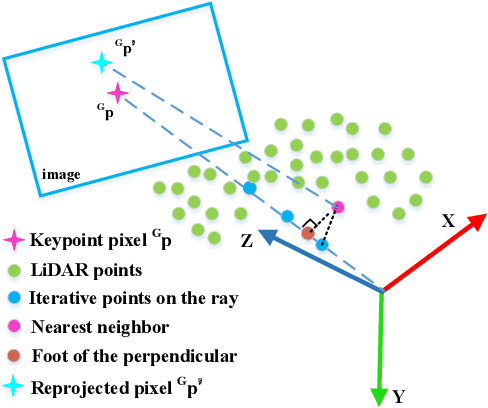

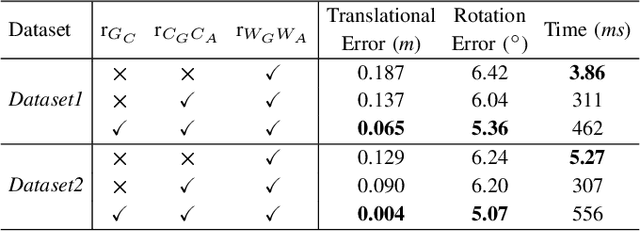
Efficient, accurate, and flexible relative localization is crucial in air-ground collaborative tasks. However, current approaches for robot relative localization are primarily realized in the form of distributed multi-robot SLAM systems with the same sensor configuration, which are tightly coupled with the state estimation of all robots, limiting both flexibility and accuracy. To this end, we fully leverage the high capacity of Unmanned Ground Vehicle (UGV) to integrate multiple sensors, enabling a semi-distributed cross-modal air-ground relative localization framework. In this work, both the UGV and the Unmanned Aerial Vehicle (UAV) independently perform SLAM while extracting deep learning-based keypoints and global descriptors, which decouples the relative localization from the state estimation of all agents. The UGV employs a local Bundle Adjustment (BA) with LiDAR, camera, and an IMU to rapidly obtain accurate relative pose estimates. The BA process adopts sparse keypoint optimization and is divided into two stages: First, optimizing camera poses interpolated from LiDAR-Inertial Odometry (LIO), followed by estimating the relative camera poses between the UGV and UAV. Additionally, we implement an incremental loop closure detection algorithm using deep learning-based descriptors to maintain and retrieve keyframes efficiently. Experimental results demonstrate that our method achieves outstanding performance in both accuracy and efficiency. Unlike traditional multi-robot SLAM approaches that transmit images or point clouds, our method only transmits keypoint pixels and their descriptors, effectively constraining the communication bandwidth under 0.3 Mbps. Codes and data will be publicly available on https://github.com/Ascbpiac/cross-model-relative-localization.git.
Bag-of-Word-Groups (BoWG): A Robust and Efficient Loop Closure Detection Method Under Perceptual Aliasing
Oct 26, 2025Loop closure is critical in Simultaneous Localization and Mapping (SLAM) systems to reduce accumulative drift and ensure global mapping consistency. However, conventional methods struggle in perceptually aliased environments, such as narrow pipes, due to vector quantization, feature sparsity, and repetitive textures, while existing solutions often incur high computational costs. This paper presents Bag-of-Word-Groups (BoWG), a novel loop closure detection method that achieves superior precision-recall, robustness, and computational efficiency. The core innovation lies in the introduction of word groups, which captures the spatial co-occurrence and proximity of visual words to construct an online dictionary. Additionally, drawing inspiration from probabilistic transition models, we incorporate temporal consistency directly into similarity computation with an adaptive scheme, substantially improving precision-recall performance. The method is further strengthened by a feature distribution analysis module and dedicated post-verification mechanisms. To evaluate the effectiveness of our method, we conduct experiments on both public datasets and a confined-pipe dataset we constructed. Results demonstrate that BoWG surpasses state-of-the-art methods, including both traditional and learning-based approaches, in terms of precision-recall and computational efficiency. Our approach also exhibits excellent scalability, achieving an average processing time of 16 ms per image across 17,565 images in the Bicocca25b dataset.