 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWireless communication empowers online scheduling of partially-observable transportation multi-robot systems in a smart factory
Mar 25, 2026Achieving agile and reconfigurable production flows in smart factories depends on online multi-robot task assignment (MRTA), which requires online collision-free and congestion-free route scheduling of transportation multi-robot systems (T-MRS), e.g., collaborative automatic guided vehicles (AGVs). Due to the real-time operational requirements and dynamic interactions between T-MRS and production MRS, online scheduling under partial observability in dynamic factory environments remains a significant and under-explored challenge. This paper proposes a novel communication-enabled online scheduling framework that explicitly couples wireless machine-to-machine (M2M) networking with route scheduling, enabling AGVs to exchange intention information, e.g., planned routes, to overcome partial observations and assist complex computation of online scheduling. Specifically, we determine intelligent AGVs' intention and sensor data as new M2M traffic and tailor the retransmission-free multi-link transmission networking to meet real-time operation demands. This scheduling-oriented networking is then integrated with a simulated annealing-based MRTA scheme and a congestion-aware A*-based route scheduling method. The integrated communication and scheduling scheme allows AGVs to dynamically adjust collision-free and congestion-free routes with reduced computational overhead. Numerical experiments shows the impacts from wireless communication on the performance of T-MRS and suggest that the proposed integrated scheme significantly enhances scheduling efficiency compared to other baselines, even under high AGV load conditions and limited channel resources. Moreover, the results reveal that the scheduling-oriented wireless M2M communication design fundamentally differs from human-to-human communications, implying new technological opportunities in a wireless networked smart factory.
PNE-SGAN: Probabilistic NDT-Enhanced Semantic Graph Attention Network for LiDAR Loop Closure Detection
Apr 11, 2025



LiDAR loop closure detection (LCD) is crucial for consistent Simultaneous Localization and Mapping (SLAM) but faces challenges in robustness and accuracy. Existing methods, including semantic graph approaches, often suffer from coarse geometric representations and lack temporal robustness against noise, dynamics, and viewpoint changes. We introduce PNE-SGAN, a Probabilistic NDT-Enhanced Semantic Graph Attention Network, to overcome these limitations. PNE-SGAN enhances semantic graphs by using Normal Distributions Transform (NDT) covariance matrices as rich, discriminative geometric node features, processed via a Graph Attention Network (GAT). Crucially, it integrates graph similarity scores into a probabilistic temporal filtering framework (modeled as an HMM/Bayes filter), incorporating uncertain odometry for motion modeling and utilizing forward-backward smoothing to effectively handle ambiguities. Evaluations on challenging KITTI sequences (00 and 08) demonstrate state-of-the-art performance, achieving Average Precision of 96.2\% and 95.1\%, respectively. PNE-SGAN significantly outperforms existing methods, particularly in difficult bidirectional loop scenarios where others falter. By synergizing detailed NDT geometry with principled probabilistic temporal reasoning, PNE-SGAN offers a highly accurate and robust solution for LiDAR LCD, enhancing SLAM reliability in complex, large-scale environments.
LagKV: Lag-Relative Information of the KV Cache Tells Which Tokens Are Important
Apr 07, 2025The increasing size of the Key-Value (KV) cache during the Large Language Models long-context inference is the main obstacle for its balance between the deployment cost and task accuracy. To reduce the KV cache size in such scenarios, most previous efforts leveraged on the attention weight to evict non-critical cache tokens. But there is a trade-off in those methods, they usually require major modifiation of the inference infrastructure and significant computation overhead. Base on the fact that the Large Lanuage models are autoregresssive models, we propose {\it LagKV}, a KV allocation strategy only relying on straight forward comparison among KV themself. It is a totally attention free method which offers easy integration to the main stream inference platform and comparable performance comparing to other complicated KV compression methods. Results on LongBench and PasskeyRetrieval show that, our approach achieves nearly zero loss when the ratio is $2\times$ and $\approx 90\%$ of the original model performance for $8\times$. Especially in the 64-digit passkey retrieval task, our mehod outperforms the attention weight based method $H_2O$ over $60\%$ with same compression ratios. Our code is available at \url{https://github.com/AI-Lab-China-Merchants-Bank/LagKV}.
SP-SLAM: Neural Real-Time Dense SLAM With Scene Priors
Jan 11, 2025Neural implicit representations have recently shown promising progress in dense Simultaneous Localization And Mapping (SLAM). However, existing works have shortcomings in terms of reconstruction quality and real-time performance, mainly due to inflexible scene representation strategy without leveraging any prior information. In this paper, we introduce SP-SLAM, a novel neural RGB-D SLAM system that performs tracking and mapping in real-time. SP-SLAM computes depth images and establishes sparse voxel-encoded scene priors near the surfaces to achieve rapid convergence of the model. Subsequently, the encoding voxels computed from single-frame depth image are fused into a global volume, which facilitates high-fidelity surface reconstruction. Simultaneously, we employ tri-planes to store scene appearance information, striking a balance between achieving high-quality geometric texture mapping and minimizing memory consumption. Furthermore, in SP-SLAM, we introduce an effective optimization strategy for mapping, allowing the system to continuously optimize the poses of all historical input frames during runtime without increasing computational overhead. We conduct extensive evaluations on five benchmark datasets (Replica, ScanNet, TUM RGB-D, Synthetic RGB-D, 7-Scenes). The results demonstrate that, compared to existing methods, we achieve superior tracking accuracy and reconstruction quality, while running at a significantly faster speed.
iFADIT: Invertible Face Anonymization via Disentangled Identity Transform
Jan 08, 2025Face anonymization aims to conceal the visual identity of a face to safeguard the individual's privacy. Traditional methods like blurring and pixelation can largely remove identifying features, but these techniques significantly degrade image quality and are vulnerable to deep reconstruction attacks. Generative models have emerged as a promising solution for anonymizing faces while preserving a natural appearance.However, many still face limitations in visual quality and often overlook the potential to recover the original face from the anonymized version, which can be valuable in specific contexts such as image forensics. This paper proposes a novel framework named iFADIT, an acronym for Invertible Face Anonymization via Disentangled Identity Transform.The framework features a disentanglement architecture coupled with a secure flow-based model: the former decouples identity information from non-identifying attributes, while the latter transforms the decoupled identity into an anonymized version in an invertible manner controlled by a secret key. The anonymized face can then be reconstructed based on a pre-trained StyleGAN that ensures high image quality and realistic facial details. Recovery of the original face (aka de-anonymization) is possible upon the availability of the matching secret, by inverting the anonymization process based on the same set of model parameters. Furthermore, a dedicated secret-key mechanism along with a dual-phase training strategy is devised to ensure the desired properties of face anonymization. Qualitative and quantitative experiments demonstrate the superiority of the proposed approach in anonymity, reversibility, security, diversity, and interpretability over competing methods.
Whole-Body Impedance Coordinative Control of Wheel-Legged Robot on Uncertain Terrain
Nov 15, 2024



This article propose a whole-body impedance coordinative control framework for a wheel-legged humanoid robot to achieve adaptability on complex terrains while maintaining robot upper body stability. The framework contains a bi-level control strategy. The outer level is a variable damping impedance controller, which optimizes the damping parameters to ensure the stability of the upper body while holding an object. The inner level employs Whole-Body Control (WBC) optimization that integrates real-time terrain estimation based on wheel-foot position and force data. It generates motor torques while accounting for dynamic constraints, joint limits,friction cones, real-time terrain updates, and a model-free friction compensation strategy. The proposed whole-body coordinative control method has been tested on a recently developed quadruped humanoid robot. The results demonstrate that the proposed algorithm effectively controls the robot, maintaining upper body stability to successfully complete a water-carrying task while adapting to varying terrains.
Uncovering the Secrets of Human-Like Movement: A Fresh Perspective on Motion Planning
Sep 18, 2024



This article explores human-like movement from a fresh perspective on motion planning. We analyze the coordinated and compliant movement mechanisms of the human body from the perspective of biomechanics. Based on these mechanisms, we propose an optimal control framework that integrates compliant control dynamics, optimizing robotic arm motion through a response time matrix. This matrix sets the timing parameters for joint movements, turning the system into a time-parameterized optimal control problem. The model focuses on the interaction between active and passive joints under external disturbances, improving adaptability and compliance. This method achieves optimal trajectory generation and balances precision and compliance. Experimental results on both a manipulator and a humanoid robot validate the approach.
A Fairness-Oriented Control Framework for Safety-Critical Multi-Robot Systems: Alternative Authority Control
Sep 16, 2024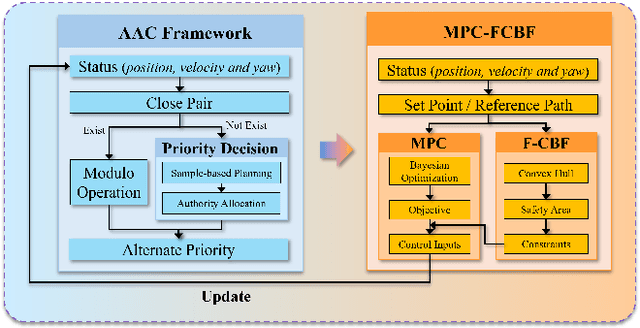
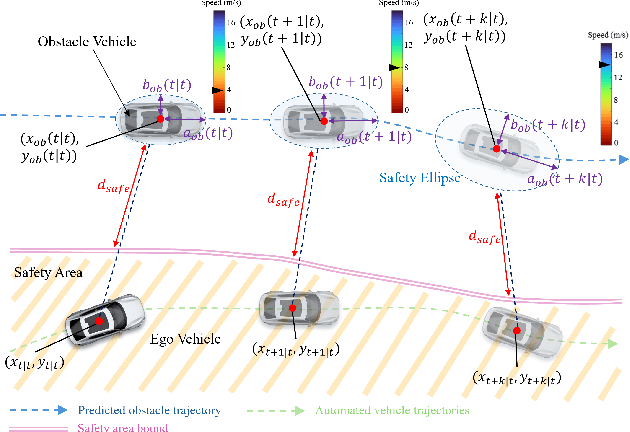
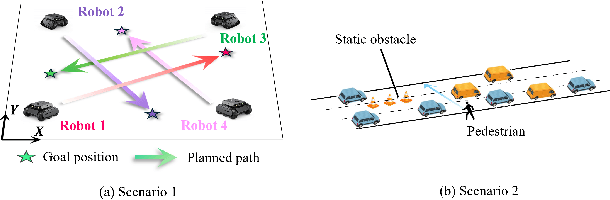
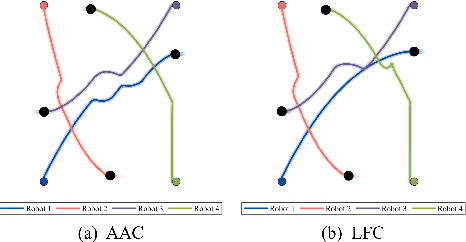
This paper proposes a fair control framework for multi-robot systems, which integrates the newly introduced Alternative Authority Control (AAC) and Flexible Control Barrier Function (F-CBF). Control authority refers to a single robot which can plan its trajectory while considering others as moving obstacles, meaning the other robots do not have authority to plan their own paths. The AAC method dynamically distributes the control authority, enabling fair and coordinated movement across the system. This approach significantly improves computational efficiency, scalability, and robustness in complex environments. The proposed F-CBF extends traditional CBFs by incorporating obstacle shape, velocity, and orientation. F-CBF enhances safety by accurate dynamic obstacle avoidance. The framework is validated through simulations in multi-robot scenarios, demonstrating its safety, robustness and computational efficiency.
Lifelike Agility and Play on Quadrupedal Robots using Reinforcement Learning and Generative Pre-trained Models
Aug 29, 2023Summarizing knowledge from animals and human beings inspires robotic innovations. In this work, we propose a framework for driving legged robots act like real animals with lifelike agility and strategy in complex environments. Inspired by large pre-trained models witnessed with impressive performance in language and image understanding, we introduce the power of advanced deep generative models to produce motor control signals stimulating legged robots to act like real animals. Unlike conventional controllers and end-to-end RL methods that are task-specific, we propose to pre-train generative models over animal motion datasets to preserve expressive knowledge of animal behavior. The pre-trained model holds sufficient primitive-level knowledge yet is environment-agnostic. It is then reused for a successive stage of learning to align with the environments by traversing a number of challenging obstacles that are rarely considered in previous approaches, including creeping through narrow spaces, jumping over hurdles, freerunning over scattered blocks, etc. Finally, a task-specific controller is trained to solve complex downstream tasks by reusing the knowledge from previous stages. Enriching the knowledge regarding each stage does not affect the usage of other levels of knowledge. This flexible framework offers the possibility of continual knowledge accumulation at different levels. We successfully apply the trained multi-level controllers to the MAX robot, a quadrupedal robot developed in-house, to mimic animals, traverse complex obstacles, and play in a designed challenging multi-agent Chase Tag Game, where lifelike agility and strategy emerge on the robots. The present research pushes the frontier of robot control with new insights on reusing multi-level pre-trained knowledge and solving highly complex downstream tasks in the real world.
Game Theory and Coverage Optimization Based Multihop Routing Protocol for Network Lifetime in Wireless Sensor Networks
Jul 03, 2023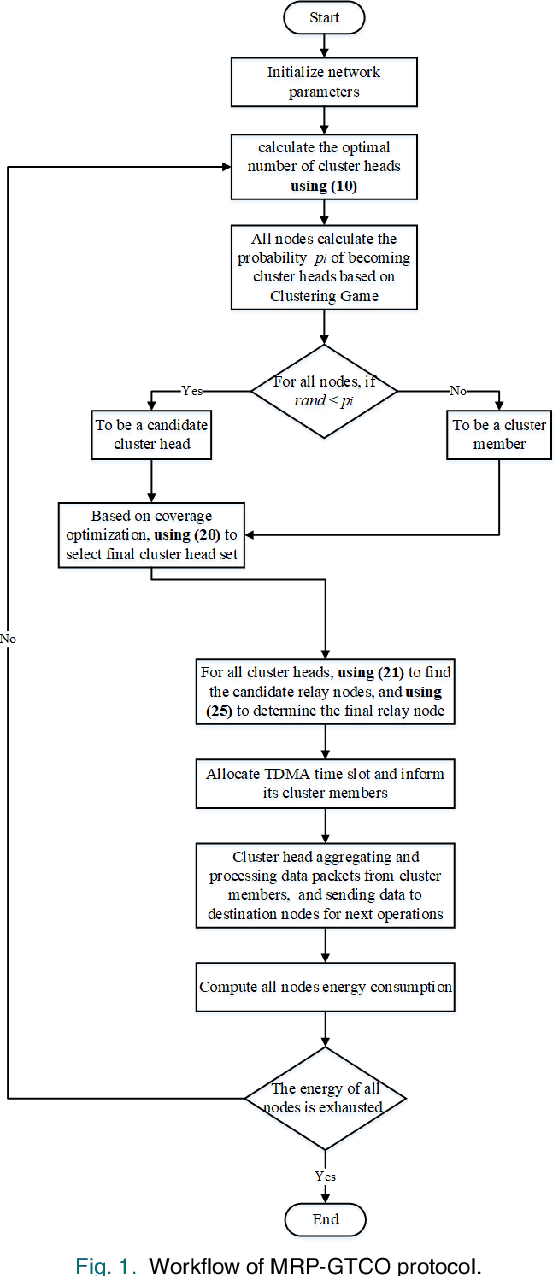
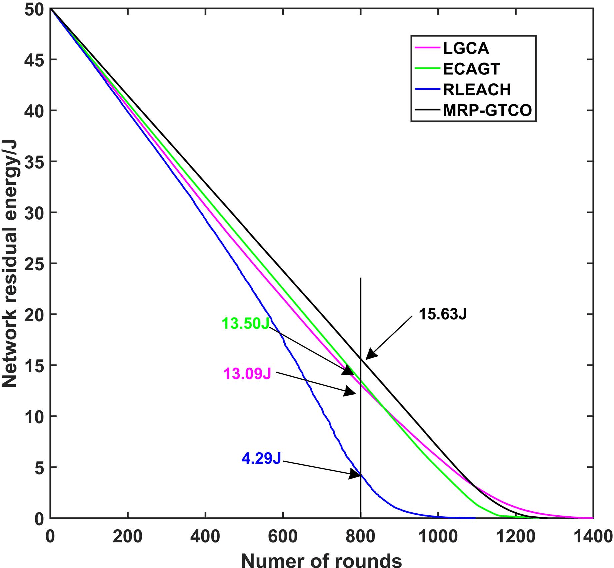
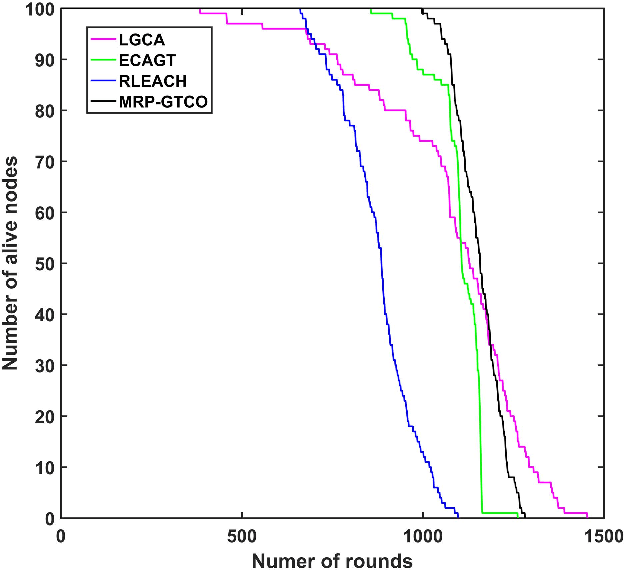
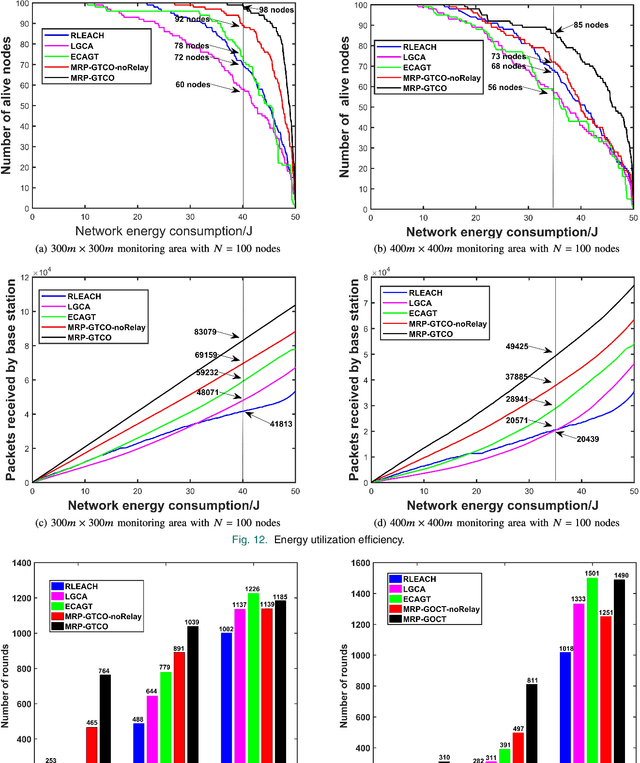
Wireless sensor networks (WSNs) are self-organizing monitoring networks with a large number of randomly deployed microsensor nodes to collect various physical information to realize tasks such as intelligent perception, efficient control, and decision-making. However, WSN nodes are powered by batteries, so they will run out of energy after a certain time. This energy limitation will greatly constrain the network performance like network lifetime and energy efficiency. In this study, to prolong the network lifetime, we proposed a multi-hop routing protocol based on game theory and coverage optimization (MRP-GTCO). Briefly, in the stage of setup, two innovational strategies including a clustering game with penalty function and cluster head coverage set were designed to realize the uniformity of cluster head distribution and improve the rationality of cluster head election. In the data transmission stage, we first derived the applicable conditions theorem of inter-cluster multi-hop routing. Based on this, a novel multi-hop path selection algorithm related to residual energy and node degree was proposed to provide an energy-efficient data transmission path. The simulation results showed that the MRP-GTCO protocol can effectively reduce the network energy consumption and extend the network lifetime by 159.22%, 50.76%, and 16.46% compared with LGCA, RLEACH, and ECAGT protocols.
* 14 pages, 13 figure, 3 tables