 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFair and Safe: A Real-Time Hierarchical Control Framework for Intersections
Nov 08, 2025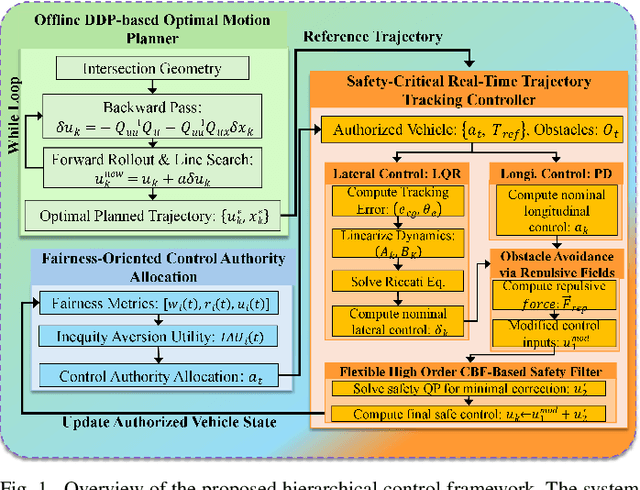

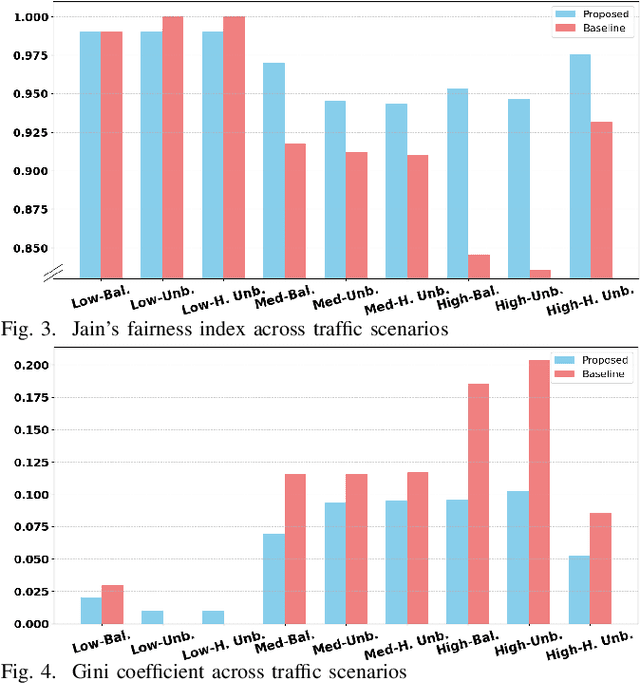

Ensuring fairness in the coordination of connected and automated vehicles at intersections is essential for equitable access, social acceptance, and long-term system efficiency, yet it remains underexplored in safety-critical, real-time traffic control. This paper proposes a fairness-aware hierarchical control framework that explicitly integrates inequity aversion into intersection management. At the top layer, a centralized allocation module assigns control authority (i.e., selects a single vehicle to execute its trajectory) by maximizing a utility that accounts for waiting time, urgency, control history, and velocity deviation. At the bottom layer, the authorized vehicle executes a precomputed trajectory using a Linear Quadratic Regulator (LQR) and applies a high-order Control Barrier Function (HOCBF)-based safety filter for real-time collision avoidance. Simulation results across varying traffic demands and demand distributions demonstrate that the proposed framework achieves near-perfect fairness, eliminates collisions, reduces average delay, and maintains real-time feasibility. These results highlight that fairness can be systematically incorporated without sacrificing safety or performance, enabling scalable and equitable coordination for future autonomous traffic systems.
REACT: Runtime-Enabled Active Collision-avoidance Technique for Autonomous Driving
May 16, 2025Achieving rapid and effective active collision avoidance in dynamic interactive traffic remains a core challenge for autonomous driving. This paper proposes REACT (Runtime-Enabled Active Collision-avoidance Technique), a closed-loop framework that integrates risk assessment with active avoidance control. By leveraging energy transfer principles and human-vehicle-road interaction modeling, REACT dynamically quantifies runtime risk and constructs a continuous spatial risk field. The system incorporates physically grounded safety constraints such as directional risk and traffic rules to identify high-risk zones and generate feasible, interpretable avoidance behaviors. A hierarchical warning trigger strategy and lightweight system design enhance runtime efficiency while ensuring real-time responsiveness. Evaluations across four representative high-risk scenarios including car-following braking, cut-in, rear-approaching, and intersection conflict demonstrate REACT's capability to accurately identify critical risks and execute proactive avoidance. Its risk estimation aligns closely with human driver cognition (i.e., warning lead time < 0.4 s), achieving 100% safe avoidance with zero false alarms or missed detections. Furthermore, it exhibits superior real-time performance (< 50 ms latency), strong foresight, and generalization. The lightweight architecture achieves state-of-the-art accuracy, highlighting its potential for real-time deployment in safety-critical autonomous systems.
RiskNet: Interaction-Aware Risk Forecasting for Autonomous Driving in Long-Tail Scenarios
Apr 22, 2025Ensuring the safety of autonomous vehicles (AVs) in long-tail scenarios remains a critical challenge, particularly under high uncertainty and complex multi-agent interactions. To address this, we propose RiskNet, an interaction-aware risk forecasting framework, which integrates deterministic risk modeling with probabilistic behavior prediction for comprehensive risk assessment. At its core, RiskNet employs a field-theoretic model that captures interactions among ego vehicle, surrounding agents, and infrastructure via interaction fields and force. This model supports multidimensional risk evaluation across diverse scenarios (highways, intersections, and roundabouts), and shows robustness under high-risk and long-tail settings. To capture the behavioral uncertainty, we incorporate a graph neural network (GNN)-based trajectory prediction module, which learns multi-modal future motion distributions. Coupled with the deterministic risk field, it enables dynamic, probabilistic risk inference across time, enabling proactive safety assessment under uncertainty. Evaluations on the highD, inD, and rounD datasets, spanning lane changes, turns, and complex merges, demonstrate that our method significantly outperforms traditional approaches (e.g., TTC, THW, RSS, NC Field) in terms of accuracy, responsiveness, and directional sensitivity, while maintaining strong generalization across scenarios. This framework supports real-time, scenario-adaptive risk forecasting and demonstrates strong generalization across uncertain driving environments. It offers a unified foundation for safety-critical decision-making in long-tail scenarios.
Uncovering the Secrets of Human-Like Movement: A Fresh Perspective on Motion Planning
Sep 18, 2024



This article explores human-like movement from a fresh perspective on motion planning. We analyze the coordinated and compliant movement mechanisms of the human body from the perspective of biomechanics. Based on these mechanisms, we propose an optimal control framework that integrates compliant control dynamics, optimizing robotic arm motion through a response time matrix. This matrix sets the timing parameters for joint movements, turning the system into a time-parameterized optimal control problem. The model focuses on the interaction between active and passive joints under external disturbances, improving adaptability and compliance. This method achieves optimal trajectory generation and balances precision and compliance. Experimental results on both a manipulator and a humanoid robot validate the approach.
A Fairness-Oriented Control Framework for Safety-Critical Multi-Robot Systems: Alternative Authority Control
Sep 16, 2024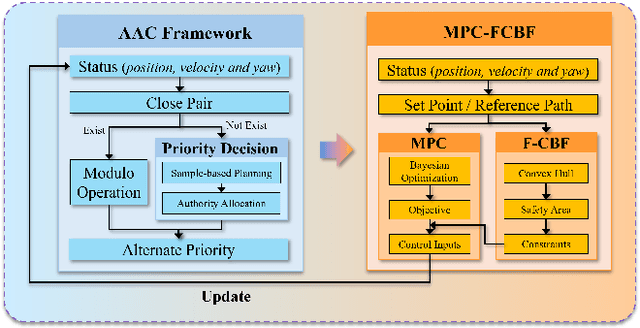
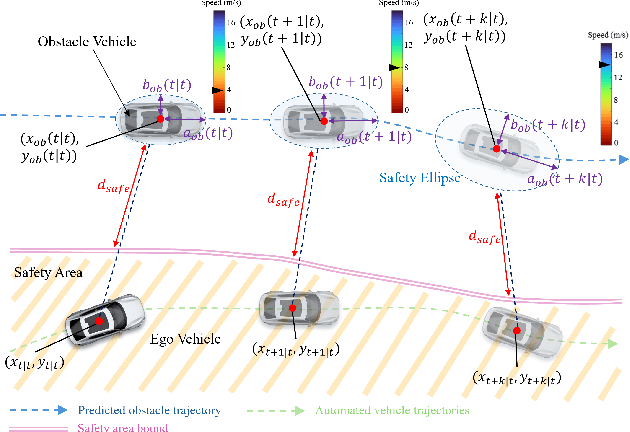
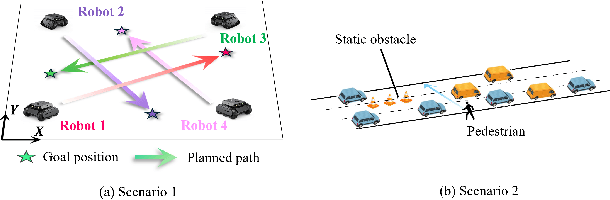
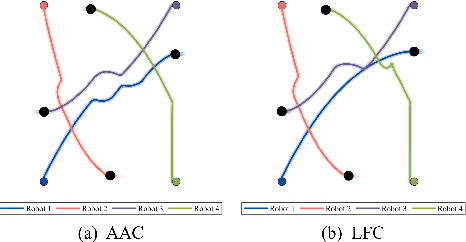
This paper proposes a fair control framework for multi-robot systems, which integrates the newly introduced Alternative Authority Control (AAC) and Flexible Control Barrier Function (F-CBF). Control authority refers to a single robot which can plan its trajectory while considering others as moving obstacles, meaning the other robots do not have authority to plan their own paths. The AAC method dynamically distributes the control authority, enabling fair and coordinated movement across the system. This approach significantly improves computational efficiency, scalability, and robustness in complex environments. The proposed F-CBF extends traditional CBFs by incorporating obstacle shape, velocity, and orientation. F-CBF enhances safety by accurate dynamic obstacle avoidance. The framework is validated through simulations in multi-robot scenarios, demonstrating its safety, robustness and computational efficiency.