 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFair and Safe: A Real-Time Hierarchical Control Framework for Intersections
Nov 08, 2025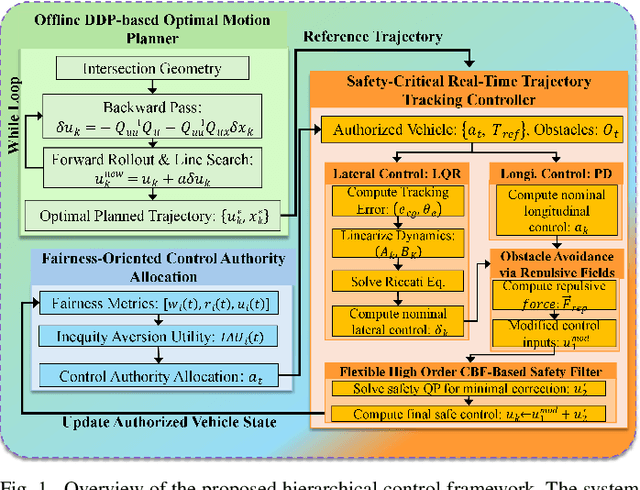

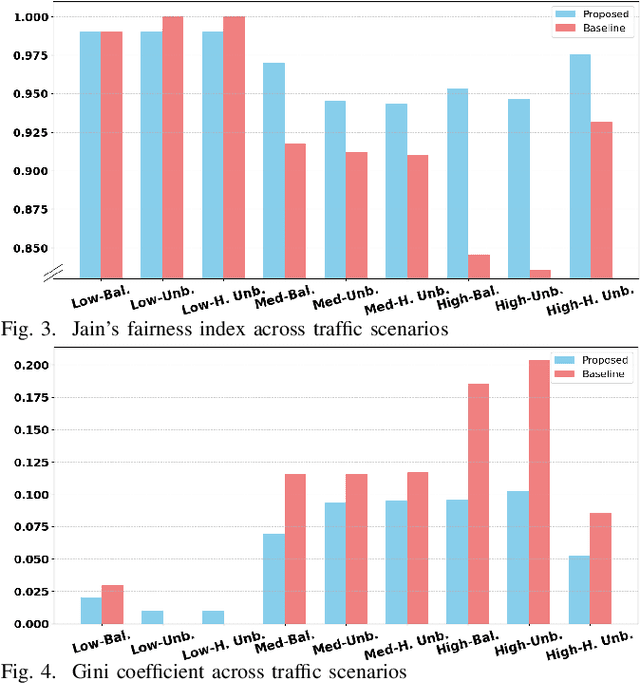

Ensuring fairness in the coordination of connected and automated vehicles at intersections is essential for equitable access, social acceptance, and long-term system efficiency, yet it remains underexplored in safety-critical, real-time traffic control. This paper proposes a fairness-aware hierarchical control framework that explicitly integrates inequity aversion into intersection management. At the top layer, a centralized allocation module assigns control authority (i.e., selects a single vehicle to execute its trajectory) by maximizing a utility that accounts for waiting time, urgency, control history, and velocity deviation. At the bottom layer, the authorized vehicle executes a precomputed trajectory using a Linear Quadratic Regulator (LQR) and applies a high-order Control Barrier Function (HOCBF)-based safety filter for real-time collision avoidance. Simulation results across varying traffic demands and demand distributions demonstrate that the proposed framework achieves near-perfect fairness, eliminates collisions, reduces average delay, and maintains real-time feasibility. These results highlight that fairness can be systematically incorporated without sacrificing safety or performance, enabling scalable and equitable coordination for future autonomous traffic systems.
RiskNet: Interaction-Aware Risk Forecasting for Autonomous Driving in Long-Tail Scenarios
Apr 22, 2025Ensuring the safety of autonomous vehicles (AVs) in long-tail scenarios remains a critical challenge, particularly under high uncertainty and complex multi-agent interactions. To address this, we propose RiskNet, an interaction-aware risk forecasting framework, which integrates deterministic risk modeling with probabilistic behavior prediction for comprehensive risk assessment. At its core, RiskNet employs a field-theoretic model that captures interactions among ego vehicle, surrounding agents, and infrastructure via interaction fields and force. This model supports multidimensional risk evaluation across diverse scenarios (highways, intersections, and roundabouts), and shows robustness under high-risk and long-tail settings. To capture the behavioral uncertainty, we incorporate a graph neural network (GNN)-based trajectory prediction module, which learns multi-modal future motion distributions. Coupled with the deterministic risk field, it enables dynamic, probabilistic risk inference across time, enabling proactive safety assessment under uncertainty. Evaluations on the highD, inD, and rounD datasets, spanning lane changes, turns, and complex merges, demonstrate that our method significantly outperforms traditional approaches (e.g., TTC, THW, RSS, NC Field) in terms of accuracy, responsiveness, and directional sensitivity, while maintaining strong generalization across scenarios. This framework supports real-time, scenario-adaptive risk forecasting and demonstrates strong generalization across uncertain driving environments. It offers a unified foundation for safety-critical decision-making in long-tail scenarios.
Truck Parking Usage Prediction with Decomposed Graph Neural Networks
Jan 23, 2024Truck parking on freight corridors faces various challenges, such as insufficient parking spaces and compliance with Hour-of-Service (HOS) regulations. These constraints often result in unauthorized parking practices, causing safety concerns. To enhance the safety of freight operations, providing accurate parking usage prediction proves to be a cost-effective solution. Despite the existing research demonstrating satisfactory accuracy for predicting individual truck parking site usage, few approaches have been proposed for predicting usage with spatial dependencies of multiple truck parking sites. We present the Regional Temporal Graph Neural Network (RegT-GCN) as a predictive framework for assessing parking usage across the entire state to provide better truck parking information and mitigate unauthorized parking. The framework leverages the topological structures of truck parking site distributions and historical parking data to predict occupancy rates across a state. To achieve this, we introduce a Regional Decomposition approach, which effectively captures the geographical characteristics. We also introduce the spatial module working efficiently with the temporal module. Evaluation results demonstrate that the proposed model surpasses other baseline models, improving the performance by more than $20\%$ compared with the original model. The proposed model allows truck parking sites' percipience of the topological structures and provides higher performance.
Learning Driver Models for Automated Vehicles via Knowledge Sharing and Personalization
Aug 31, 2023This paper describes a framework for learning Automated Vehicles (AVs) driver models via knowledge sharing between vehicles and personalization. The innate variability in the transportation system makes it exceptionally challenging to expose AVs to all possible driving scenarios during empirical experimentation or testing. Consequently, AVs could be blind to certain encounters that are deemed detrimental to their safe and efficient operation. It is then critical to share knowledge across AVs that increase exposure to driving scenarios occurring in the real world. This paper explores a method to collaboratively train a driver model by sharing knowledge and borrowing strength across vehicles while retaining a personalized model tailored to the vehicle's unique conditions and properties. Our model brings a federated learning approach to collaborate between multiple vehicles while circumventing the need to share raw data between them. We showcase our method's performance in experimental simulations. Such an approach to learning finds several applications across transportation engineering including intelligent transportation systems, traffic management, and vehicle-to-vehicle communication. Code and sample dataset are made available at the project page https://github.com/wissamkontar.
CV2X-LOCA: Roadside Unit-Enabled Cooperative Localization Framework for Autonomous Vehicles
Apr 03, 2023



An accurate and robust localization system is crucial for autonomous vehicles (AVs) to enable safe driving in urban scenes. While existing global navigation satellite system (GNSS)-based methods are effective at locating vehicles in open-sky regions, achieving high-accuracy positioning in urban canyons such as lower layers of multi-layer bridges, streets beside tall buildings, tunnels, etc., remains a challenge. In this paper, we investigate the potential of cellular-vehicle-to-everything (C-V2X) wireless communications in improving the localization performance of AVs under GNSS-denied environments. Specifically, we propose the first roadside unit (RSU)-enabled cooperative localization framework, namely CV2X-LOCA, that only uses C-V2X channel state information to achieve lane-level positioning accuracy. CV2X-LOCA consists of four key parts: data processing module, coarse positioning module, environment parameter correcting module, and vehicle trajectory filtering module. These modules jointly handle challenges present in dynamic C-V2X networks. Extensive simulation and field experiments show that CV2X-LOCA achieves state-of-the-art performance for vehicle localization even under noisy conditions with high-speed movement and sparse RSUs coverage environments. The study results also provide insights into future investment decisions for transportation agencies regarding deploying RSUs cost-effectively.
Bayesian Methods in Automated Vehicle's Car-following Uncertainties: Enabling Strategic Decision Making
Oct 25, 2022



This paper proposes a methodology to estimate uncertainty in automated vehicle (AV) dynamics in real time via Bayesian inference. Based on the estimated uncertainty, the method aims to continuously monitor the car-following (CF) performance of the AV to support strategic actions to maintain a desired performance. Our methodology consists of three sequential components: (i) the Stochastic Gradient Langevin Dynamics (SGLD) is adopted to estimate parameter uncertainty relative to vehicular dynamics in real time, (ii) dynamic monitoring of car-following stability (local and string-wise), and (iii) strategic actions for control adjustment if anomaly is detected. The proposed methodology provides means to gauge AV car-following performance in real time and preserve desired performance against real time uncertainty that are unaccounted for in the vehicle control algorithm.
Predicting Vehicles' Longitudinal Trajectories and Lane Changes on Highway On-Ramps
Aug 23, 2021
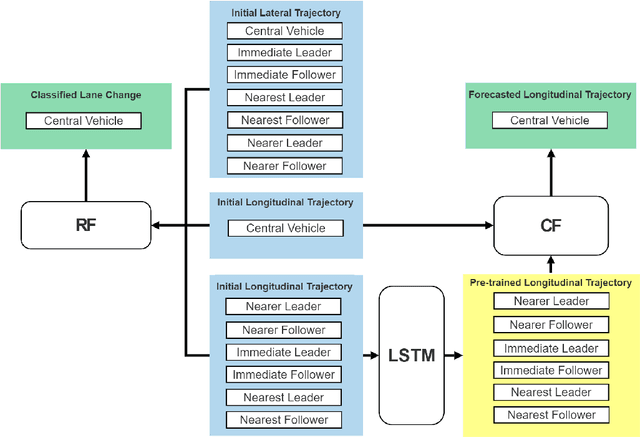

Vehicles on highway on-ramps are one of the leading contributors to congestion. In this paper, we propose a prediction framework that predicts the longitudinal trajectories and lane changes (LCs) of vehicles on highway on-ramps and tapers. Specifically, our framework adopts a combination of prediction models that inputs a 4 seconds duration of a trajectory to output a forecast of the longitudinal trajectories and LCs up to 15 seconds ahead. Training and Validation based on next generation simulation (NGSIM) data show that the prediction power of the developed model and its accuracy outperforms a traditional long-short term memory (LSTM) model. Ultimately, the work presented here can alleviate the congestion experienced on on-ramps, improve safety, and guide effective traffic control strategies.