 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFair and Safe: A Real-Time Hierarchical Control Framework for Intersections
Nov 08, 2025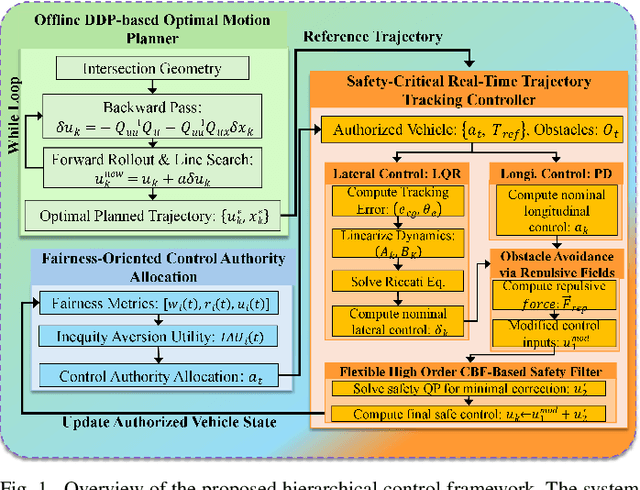

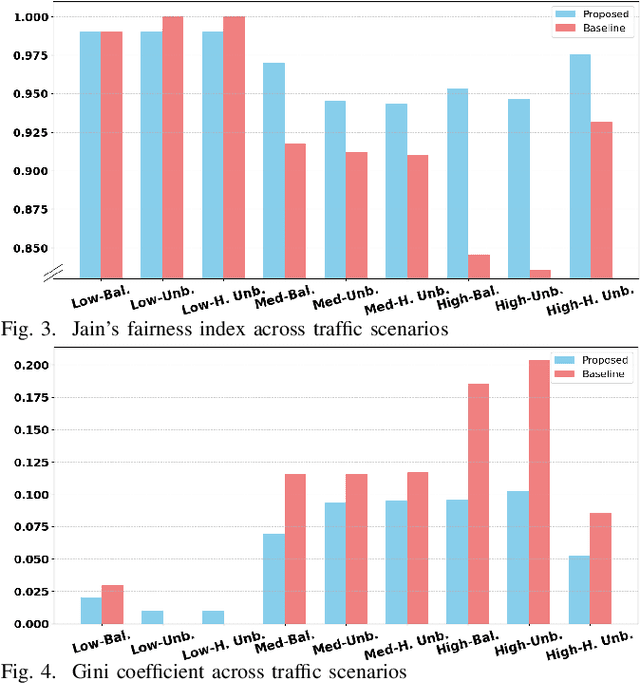

Ensuring fairness in the coordination of connected and automated vehicles at intersections is essential for equitable access, social acceptance, and long-term system efficiency, yet it remains underexplored in safety-critical, real-time traffic control. This paper proposes a fairness-aware hierarchical control framework that explicitly integrates inequity aversion into intersection management. At the top layer, a centralized allocation module assigns control authority (i.e., selects a single vehicle to execute its trajectory) by maximizing a utility that accounts for waiting time, urgency, control history, and velocity deviation. At the bottom layer, the authorized vehicle executes a precomputed trajectory using a Linear Quadratic Regulator (LQR) and applies a high-order Control Barrier Function (HOCBF)-based safety filter for real-time collision avoidance. Simulation results across varying traffic demands and demand distributions demonstrate that the proposed framework achieves near-perfect fairness, eliminates collisions, reduces average delay, and maintains real-time feasibility. These results highlight that fairness can be systematically incorporated without sacrificing safety or performance, enabling scalable and equitable coordination for future autonomous traffic systems.
Learning Driver Models for Automated Vehicles via Knowledge Sharing and Personalization
Aug 31, 2023This paper describes a framework for learning Automated Vehicles (AVs) driver models via knowledge sharing between vehicles and personalization. The innate variability in the transportation system makes it exceptionally challenging to expose AVs to all possible driving scenarios during empirical experimentation or testing. Consequently, AVs could be blind to certain encounters that are deemed detrimental to their safe and efficient operation. It is then critical to share knowledge across AVs that increase exposure to driving scenarios occurring in the real world. This paper explores a method to collaboratively train a driver model by sharing knowledge and borrowing strength across vehicles while retaining a personalized model tailored to the vehicle's unique conditions and properties. Our model brings a federated learning approach to collaborate between multiple vehicles while circumventing the need to share raw data between them. We showcase our method's performance in experimental simulations. Such an approach to learning finds several applications across transportation engineering including intelligent transportation systems, traffic management, and vehicle-to-vehicle communication. Code and sample dataset are made available at the project page https://github.com/wissamkontar.