 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning the Pareto Space of Multi-Objective Autonomous Driving: A Modular, Data-Driven Approach
Jan 26, 2026Balancing safety, efficiency, and interaction is fundamental to designing autonomous driving agents and to understanding autonomous vehicle (AV) behavior in real-world operation. This study introduces an empirical learning framework that derives these trade-offs directly from naturalistic trajectory data. A unified objective space represents each AV timestep through composite scores of safety, efficiency, and interaction. Pareto dominance is applied to identify non-dominated states, forming an empirical frontier that defines the attainable region of balanced performance. The proposed framework was demonstrated using the Third Generation Simulation (TGSIM) datasets from Foggy Bottom and I-395. Results showed that only 0.23\% of AV driving instances were Pareto-optimal, underscoring the rarity of simultaneous optimization across objectives. Pareto-optimal states showed notably higher mean scores for safety, efficiency, and interaction compared to non-optimal cases, with interaction showing the greatest potential for improvement. This minimally invasive and modular framework, which requires only kinematic and positional data, can be directly applied beyond the scope of this study to derive and visualize multi-objective learning surfaces
Fair and Safe: A Real-Time Hierarchical Control Framework for Intersections
Nov 08, 2025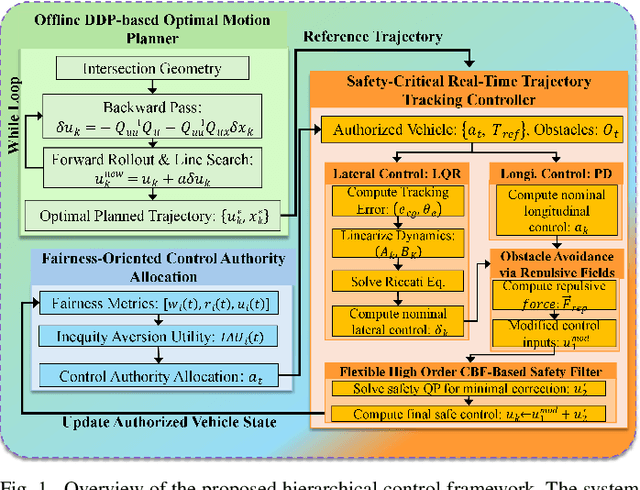

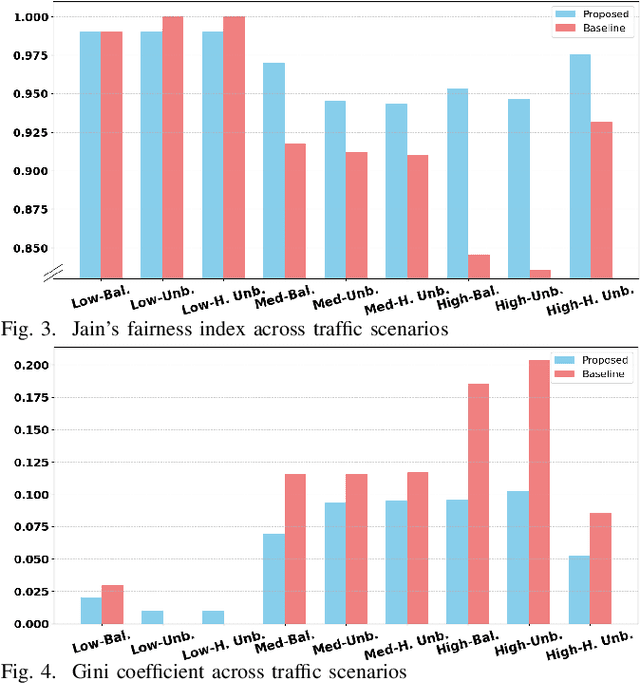

Ensuring fairness in the coordination of connected and automated vehicles at intersections is essential for equitable access, social acceptance, and long-term system efficiency, yet it remains underexplored in safety-critical, real-time traffic control. This paper proposes a fairness-aware hierarchical control framework that explicitly integrates inequity aversion into intersection management. At the top layer, a centralized allocation module assigns control authority (i.e., selects a single vehicle to execute its trajectory) by maximizing a utility that accounts for waiting time, urgency, control history, and velocity deviation. At the bottom layer, the authorized vehicle executes a precomputed trajectory using a Linear Quadratic Regulator (LQR) and applies a high-order Control Barrier Function (HOCBF)-based safety filter for real-time collision avoidance. Simulation results across varying traffic demands and demand distributions demonstrate that the proposed framework achieves near-perfect fairness, eliminates collisions, reduces average delay, and maintains real-time feasibility. These results highlight that fairness can be systematically incorporated without sacrificing safety or performance, enabling scalable and equitable coordination for future autonomous traffic systems.
Consensus-Aware AV Behavior: Trade-offs Between Safety, Interaction, and Performance in Mixed Urban Traffic
May 07, 2025Transportation systems have long been shaped by complexity and heterogeneity, driven by the interdependency of agent actions and traffic outcomes. The deployment of automated vehicles (AVs) in such systems introduces a new challenge: achieving consensus across safety, interaction quality, and traffic performance. In this work, we position consensus as a fundamental property of the traffic system and aim to quantify it. We use high-resolution trajectory data from the Third Generation Simulation (TGSIM) dataset to empirically analyze AV and human-driven vehicle (HDV) behavior at a signalized urban intersection and around vulnerable road users (VRUs). Key metrics, including Time-to-Collision (TTC), Post-Encroachment Time (PET), deceleration patterns, headways, and string stability, are evaluated across the three performance dimensions. Results show that full consensus across safety, interaction, and performance is rare, with only 1.63% of AV-VRU interaction frames meeting all three conditions. These findings highlight the need for AV models that explicitly balance multi-dimensional performance in mixed-traffic environments. Full reproducibility is supported via our open-source codebase on https://github.com/wissamkontar/Consensus-AV-Analysis.
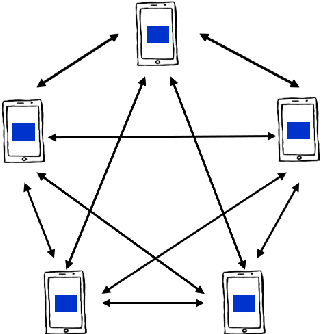
Learning Driver Models for Automated Vehicles via Knowledge Sharing and Personalization
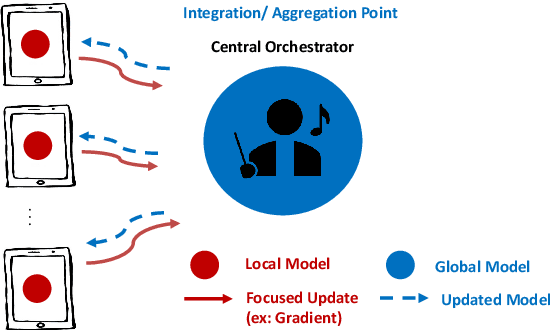
Aug 31, 2023This paper describes a framework for learning Automated Vehicles (AVs) driver models via knowledge sharing between vehicles and personalization. The innate variability in the transportation system makes it exceptionally challenging to expose AVs to all possible driving scenarios during empirical experimentation or testing. Consequently, AVs could be blind to certain encounters that are deemed detrimental to their safe and efficient operation. It is then critical to share knowledge across AVs that increase exposure to driving scenarios occurring in the real world. This paper explores a method to collaboratively train a driver model by sharing knowledge and borrowing strength across vehicles while retaining a personalized model tailored to the vehicle's unique conditions and properties. Our model brings a federated learning approach to collaborate between multiple vehicles while circumventing the need to share raw data between them. We showcase our method's performance in experimental simulations. Such an approach to learning finds several applications across transportation engineering including intelligent transportation systems, traffic management, and vehicle-to-vehicle communication. Code and sample dataset are made available at the project page https://github.com/wissamkontar.
Bayesian Methods in Automated Vehicle's Car-following Uncertainties: Enabling Strategic Decision Making
Oct 25, 2022



This paper proposes a methodology to estimate uncertainty in automated vehicle (AV) dynamics in real time via Bayesian inference. Based on the estimated uncertainty, the method aims to continuously monitor the car-following (CF) performance of the AV to support strategic actions to maintain a desired performance. Our methodology consists of three sequential components: (i) the Stochastic Gradient Langevin Dynamics (SGLD) is adopted to estimate parameter uncertainty relative to vehicular dynamics in real time, (ii) dynamic monitoring of car-following stability (local and string-wise), and (iii) strategic actions for control adjustment if anomaly is detected. The proposed methodology provides means to gauge AV car-following performance in real time and preserve desired performance against real time uncertainty that are unaccounted for in the vehicle control algorithm.
The Internet of Federated Things : A Vision for the Future and In-depth Survey of Data-driven Approaches for Federated Learning
Nov 09, 2021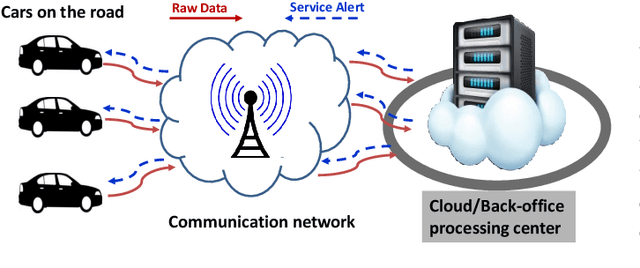
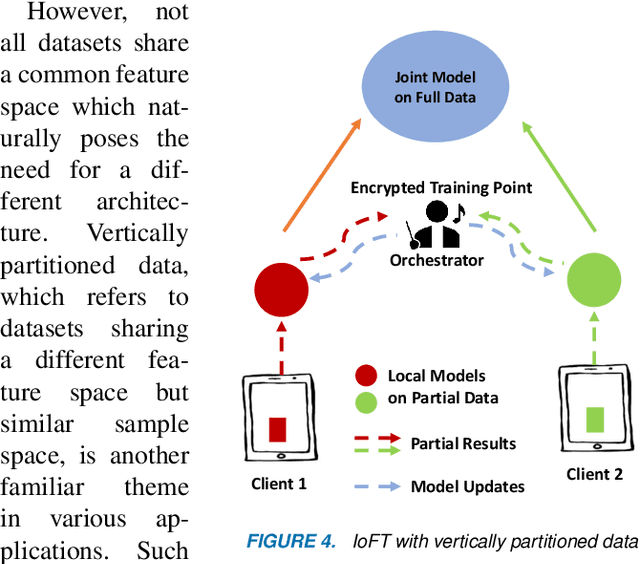
The Internet of Things (IoT) is on the verge of a major paradigm shift. In the IoT system of the future, IoFT, the cloud will be substituted by the crowd where model training is brought to the edge, allowing IoT devices to collaboratively extract knowledge and build smart analytics/models while keeping their personal data stored locally. This paradigm shift was set into motion by the tremendous increase in computational power on IoT devices and the recent advances in decentralized and privacy-preserving model training, coined as federated learning (FL). This article provides a vision for IoFT and a systematic overview of current efforts towards realizing this vision. Specifically, we first introduce the defining characteristics of IoFT and discuss FL data-driven approaches, opportunities, and challenges that allow decentralized inference within three dimensions: (i) a global model that maximizes utility across all IoT devices, (ii) a personalized model that borrows strengths across all devices yet retains its own model, (iii) a meta-learning model that quickly adapts to new devices or learning tasks. We end by describing the vision and challenges of IoFT in reshaping different industries through the lens of domain experts. Those industries include manufacturing, transportation, energy, healthcare, quality & reliability, business, and computing.
Predicting Vehicles' Longitudinal Trajectories and Lane Changes on Highway On-Ramps
Aug 23, 2021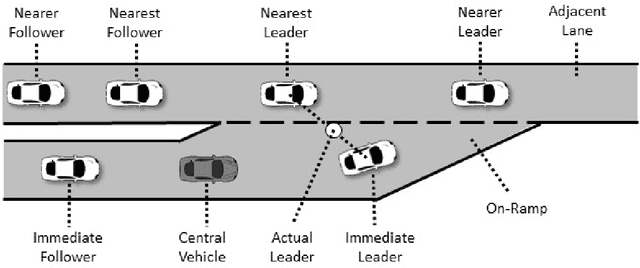
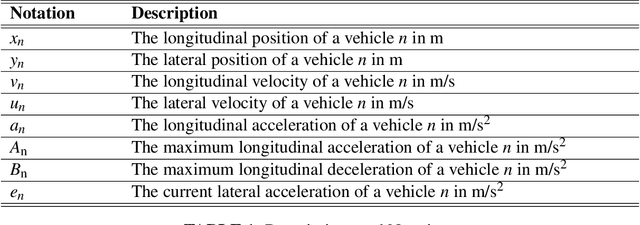
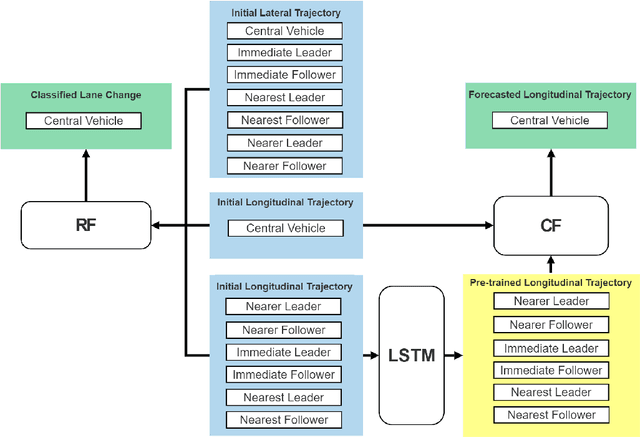

Vehicles on highway on-ramps are one of the leading contributors to congestion. In this paper, we propose a prediction framework that predicts the longitudinal trajectories and lane changes (LCs) of vehicles on highway on-ramps and tapers. Specifically, our framework adopts a combination of prediction models that inputs a 4 seconds duration of a trajectory to output a forecast of the longitudinal trajectories and LCs up to 15 seconds ahead. Training and Validation based on next generation simulation (NGSIM) data show that the prediction power of the developed model and its accuracy outperforms a traditional long-short term memory (LSTM) model. Ultimately, the work presented here can alleviate the congestion experienced on on-ramps, improve safety, and guide effective traffic control strategies.
A Prioritized Trajectory Planning Algorithm for Connected and Automated Vehicle Mandatory Lane Changes
Apr 21, 2021

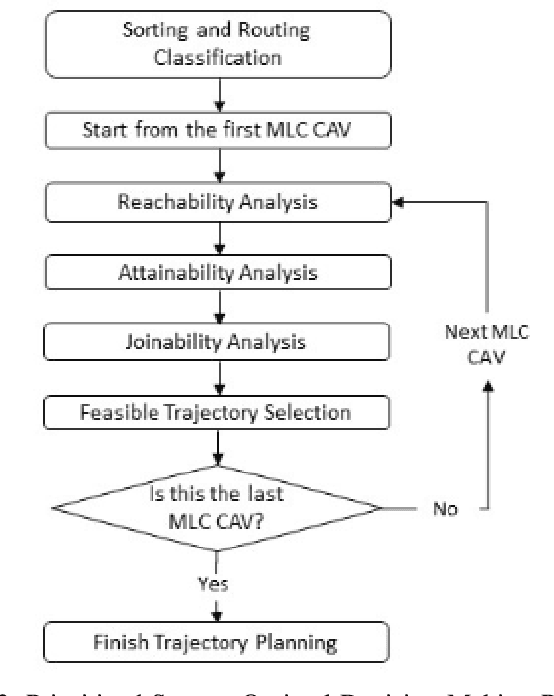

We introduce a prioritized system-optimal algorithm for mandatory lane change (MLC) behavior of connected and automated vehicles (CAV) from a dedicated lane. Our approach applies a cooperative lane change that prioritizes the decisions of lane changing vehicles which are closer to the end of the diverging zone (DZ), and optimizes the predicted total system travel time. Our experiments on synthetic data show that the proposed algorithm improves the traffic network efficiency by attaining higher speeds in the dedicated lane and earlier MLC positions while ensuring a low computational time. Our approach outperforms the traditional gap acceptance model.