 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHERMES: A Holistic End-to-End Risk-Aware Multimodal Embodied System with Vision-Language Models for Long-Tail Autonomous Driving
Feb 01, 2026End-to-end autonomous driving models increasingly benefit from large vision--language models for semantic understanding, yet ensuring safe and accurate operation under long-tail conditions remains challenging. These challenges are particularly prominent in long-tail mixed-traffic scenarios, where autonomous vehicles must interact with heterogeneous road users, including human-driven vehicles and vulnerable road users, under complex and uncertain conditions. This paper proposes HERMES, a holistic risk-aware end-to-end multimodal driving framework designed to inject explicit long-tail risk cues into trajectory planning. HERMES employs a foundation-model-assisted annotation pipeline to produce structured Long-Tail Scene Context and Long-Tail Planning Context, capturing hazard-centric cues together with maneuver intent and safety preference, and uses these signals to guide end-to-end planning. HERMES further introduces a Tri-Modal Driving Module that fuses multi-view perception, historical motion cues, and semantic guidance, ensuring risk-aware accurate trajectory planning under long-tail scenarios. Experiments on the real-world long-tail dataset demonstrate that HERMES consistently outperforms representative end-to-end and VLM-driven baselines under long-tail mixed-traffic scenarios. Ablation studies verify the complementary contributions of key components.
V2X-REALM: Vision-Language Model-Based Robust End-to-End Cooperative Autonomous Driving with Adaptive Long-Tail Modeling
Jun 26, 2025Ensuring robust planning and decision-making under rare, diverse, and visually degraded long-tail scenarios remains a fundamental challenge for autonomous driving in urban environments. This issue becomes more critical in cooperative settings, where vehicles and infrastructure jointly perceive and reason across complex environments. To address this challenge, we propose V2X-REALM, a vision-language model (VLM)-based framework with adaptive multimodal learning for robust cooperative autonomous driving under long-tail scenarios. V2X-REALM introduces three core innovations: (i) a prompt-driven long-tail scenario generation and evaluation pipeline that leverages foundation models to synthesize realistic long-tail conditions such as snow and fog across vehicle- and infrastructure-side views, enriching training diversity efficiently; (ii) a gated multi-scenario adaptive attention module that modulates the visual stream using scenario priors to recalibrate ambiguous or corrupted features; and (iii) a multi-task scenario-aware contrastive learning objective that improves multimodal alignment and promotes cross-scenario feature separability. Extensive experiments demonstrate that V2X-REALM significantly outperforms existing baselines in robustness, semantic reasoning, safety, and planning accuracy under complex, challenging driving conditions, advancing the scalability of end-to-end cooperative autonomous driving.
Planning Safety Trajectories with Dual-Phase, Physics-Informed, and Transportation Knowledge-Driven Large Language Models
Apr 06, 2025Foundation models have demonstrated strong reasoning and generalization capabilities in driving-related tasks, including scene understanding, planning, and control. However, they still face challenges in hallucinations, uncertainty, and long inference latency. While existing foundation models have general knowledge of avoiding collisions, they often lack transportation-specific safety knowledge. To overcome these limitations, we introduce LetsPi, a physics-informed, dual-phase, knowledge-driven framework for safe, human-like trajectory planning. To prevent hallucinations and minimize uncertainty, this hybrid framework integrates Large Language Model (LLM) reasoning with physics-informed social force dynamics. LetsPi leverages the LLM to analyze driving scenes and historical information, providing appropriate parameters and target destinations (goals) for the social force model, which then generates the future trajectory. Moreover, the dual-phase architecture balances reasoning and computational efficiency through its Memory Collection phase and Fast Inference phase. The Memory Collection phase leverages the physics-informed LLM to process and refine planning results through reasoning, reflection, and memory modules, storing safe, high-quality driving experiences in a memory bank. Surrogate safety measures and physics-informed prompt techniques are introduced to enhance the LLM's knowledge of transportation safety and physical force, respectively. The Fast Inference phase extracts similar driving experiences as few-shot examples for new scenarios, while simplifying input-output requirements to enable rapid trajectory planning without compromising safety. Extensive experiments using the HighD dataset demonstrate that LetsPi outperforms baseline models across five safety metrics.See PDF for project Github link.
V2X-LLM: Enhancing V2X Integration and Understanding in Connected Vehicle Corridors
Mar 04, 2025



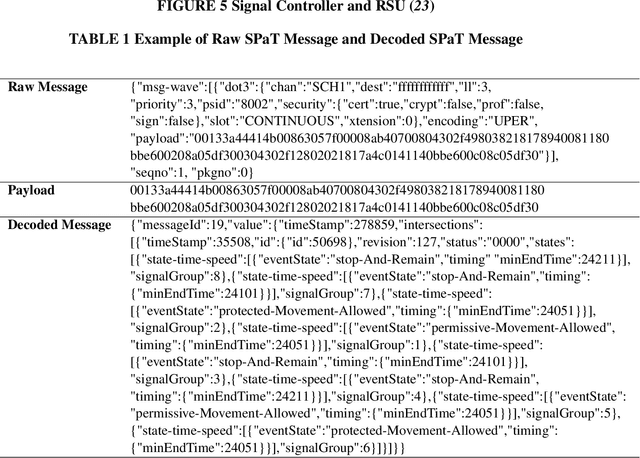
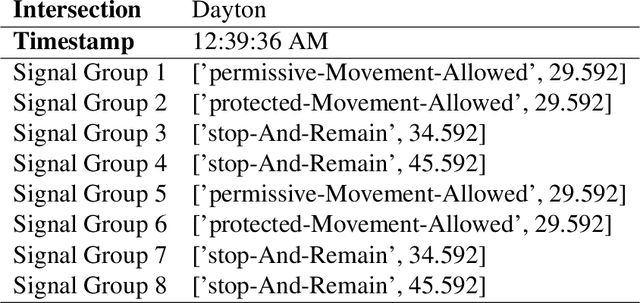
The advancement of Connected and Automated Vehicles (CAVs) and Vehicle-to-Everything (V2X) offers significant potential for enhancing transportation safety, mobility, and sustainability. However, the integration and analysis of the diverse and voluminous V2X data, including Basic Safety Messages (BSMs) and Signal Phase and Timing (SPaT) data, present substantial challenges, especially on Connected Vehicle Corridors. These challenges include managing large data volumes, ensuring real-time data integration, and understanding complex traffic scenarios. Although these projects have developed an advanced CAV data pipeline that enables real-time communication between vehicles, infrastructure, and other road users for managing connected vehicle and roadside unit (RSU) data, significant hurdles in data comprehension and real-time scenario analysis and reasoning persist. To address these issues, we introduce the V2X-LLM framework, a novel enhancement to the existing CV data pipeline. V2X-LLM leverages Large Language Models (LLMs) to improve the understanding and real-time analysis of V2X data. The framework includes four key tasks: Scenario Explanation, offering detailed narratives of traffic conditions; V2X Data Description, detailing vehicle and infrastructure statuses; State Prediction, forecasting future traffic states; and Navigation Advisory, providing optimized routing instructions. By integrating LLM-driven reasoning with V2X data within the data pipeline, the V2X-LLM framework offers real-time feedback and decision support for traffic management. This integration enhances the accuracy of traffic analysis, safety, and traffic optimization. Demonstrations in a real-world urban corridor highlight the framework's potential to advance intelligent transportation systems.
FollowGen: A Scaled Noise Conditional Diffusion Model for Car-Following Trajectory Prediction
Nov 23, 2024



Vehicle trajectory prediction is crucial for advancing autonomous driving and advanced driver assistance systems (ADAS). Although deep learning-based approaches - especially those utilizing transformer-based and generative models - have markedly improved prediction accuracy by capturing complex, non-linear patterns in vehicle dynamics and traffic interactions, they frequently overlook detailed car-following behaviors and the inter-vehicle interactions critical for real-world driving applications, particularly in fully autonomous or mixed traffic scenarios. To address the issue, this study introduces a scaled noise conditional diffusion model for car-following trajectory prediction, which integrates detailed inter-vehicular interactions and car-following dynamics into a generative framework, improving both the accuracy and plausibility of predicted trajectories. The model utilizes a novel pipeline to capture historical vehicle dynamics by scaling noise with encoded historical features within the diffusion process. Particularly, it employs a cross-attention-based transformer architecture to model intricate inter-vehicle dependencies, effectively guiding the denoising process and enhancing prediction accuracy. Experimental results on diverse real-world driving scenarios demonstrate the state-of-the-art performance and robustness of the proposed method.
Real-World Data Inspired Interactive Connected Traffic Scenario Generation
Sep 25, 2024

Simulation is a crucial step in ensuring accurate, efficient, and realistic Connected and Autonomous Vehicles (CAVs) testing and validation. As the adoption of CAV accelerates, the integration of real-world data into simulation environments becomes increasingly critical. Among various technologies utilized by CAVs, Vehicle-to-Everything (V2X) communication plays a crucial role in ensuring a seamless transmission of information between CAVs, infrastructure, and other road users. However, most existing studies have focused on developing and testing communication protocols, resource allocation strategies, and data dissemination techniques in V2X. There is a gap where real-world V2X data is integrated into simulations to generate diverse and high-fidelity traffic scenarios. To fulfill this research gap, we leverage real-world Signal Phase and Timing (SPaT) data from Roadside Units (RSUs) to enhance the fidelity of CAV simulations. Moreover, we developed an algorithm that enables Autonomous Vehicles (AVs) to respond dynamically to real-time traffic signal data, simulating realistic V2X communication scenarios. Such high-fidelity simulation environments can generate multimodal data, including trajectory, semantic camera, depth camera, and bird's eye view data for various traffic scenarios. The generated scenarios and data provide invaluable insights into AVs' interactions with traffic infrastructure and other road users. This work aims to bridge the gap between theoretical research and practical deployment of CAVs, facilitating the development of smarter and safer transportation systems.
Hypergraph-based Motion Generation with Multi-modal Interaction Relational Reasoning
Sep 18, 2024The intricate nature of real-world driving environments, characterized by dynamic and diverse interactions among multiple vehicles and their possible future states, presents considerable challenges in accurately predicting the motion states of vehicles and handling the uncertainty inherent in the predictions. Addressing these challenges requires comprehensive modeling and reasoning to capture the implicit relations among vehicles and the corresponding diverse behaviors. This research introduces an integrated framework for autonomous vehicles (AVs) motion prediction to address these complexities, utilizing a novel Relational Hypergraph Interaction-informed Neural mOtion generator (RHINO). RHINO leverages hypergraph-based relational reasoning by integrating a multi-scale hypergraph neural network to model group-wise interactions among multiple vehicles and their multi-modal driving behaviors, thereby enhancing motion prediction accuracy and reliability. Experimental validation using real-world datasets demonstrates the superior performance of this framework in improving predictive accuracy and fostering socially aware automated driving in dynamic traffic scenarios.
V2X-VLM: End-to-End V2X Cooperative Autonomous Driving Through Large Vision-Language Models
Aug 17, 2024



Advancements in autonomous driving have increasingly focused on end-to-end (E2E) systems that manage the full spectrum of driving tasks, from environmental perception to vehicle navigation and control. This paper introduces V2X-VLM, an innovative E2E vehicle-infrastructure cooperative autonomous driving (VICAD) framework with large vision-language models (VLMs). V2X-VLM is designed to enhance situational awareness, decision-making, and ultimate trajectory planning by integrating data from vehicle-mounted cameras, infrastructure sensors, and textual information. The strength of the comprehensive multimodel data fusion of the VLM enables precise and safe E2E trajectory planning in complex and dynamic driving scenarios. Validation on the DAIR-V2X dataset demonstrates that V2X-VLM outperforms existing state-of-the-art methods in cooperative autonomous driving.
Crossfusor: A Cross-Attention Transformer Enhanced Conditional Diffusion Model for Car-Following Trajectory Prediction
Jun 17, 2024



Vehicle trajectory prediction is crucial for advancing autonomous driving and advanced driver assistance systems (ADAS), enhancing road safety and traffic efficiency. While traditional methods have laid foundational work, modern deep learning techniques, particularly transformer-based models and generative approaches, have significantly improved prediction accuracy by capturing complex and non-linear patterns in vehicle motion and traffic interactions. However, these models often overlook the detailed car-following behaviors and inter-vehicle interactions essential for real-world driving scenarios. This study introduces a Cross-Attention Transformer Enhanced Conditional Diffusion Model (Crossfusor) specifically designed for car-following trajectory prediction. Crossfusor integrates detailed inter-vehicular interactions and car-following dynamics into a robust diffusion framework, improving both the accuracy and realism of predicted trajectories. The model leverages a novel temporal feature encoding framework combining GRU, location-based attention mechanisms, and Fourier embedding to capture historical vehicle dynamics. It employs noise scaled by these encoded historical features in the forward diffusion process, and uses a cross-attention transformer to model intricate inter-vehicle dependencies in the reverse denoising process. Experimental results on the NGSIM dataset demonstrate that Crossfusor outperforms state-of-the-art models, particularly in long-term predictions, showcasing its potential for enhancing the predictive capabilities of autonomous driving systems.
Truck Parking Usage Prediction with Decomposed Graph Neural Networks
Jan 23, 2024Truck parking on freight corridors faces various challenges, such as insufficient parking spaces and compliance with Hour-of-Service (HOS) regulations. These constraints often result in unauthorized parking practices, causing safety concerns. To enhance the safety of freight operations, providing accurate parking usage prediction proves to be a cost-effective solution. Despite the existing research demonstrating satisfactory accuracy for predicting individual truck parking site usage, few approaches have been proposed for predicting usage with spatial dependencies of multiple truck parking sites. We present the Regional Temporal Graph Neural Network (RegT-GCN) as a predictive framework for assessing parking usage across the entire state to provide better truck parking information and mitigate unauthorized parking. The framework leverages the topological structures of truck parking site distributions and historical parking data to predict occupancy rates across a state. To achieve this, we introduce a Regional Decomposition approach, which effectively captures the geographical characteristics. We also introduce the spatial module working efficiently with the temporal module. Evaluation results demonstrate that the proposed model surpasses other baseline models, improving the performance by more than $20\%$ compared with the original model. The proposed model allows truck parking sites' percipience of the topological structures and provides higher performance.