 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeV2I Work Zone Geometry Reconstruction with Pose-Conditioned UWB Range Denoising
May 28, 2026Reliable work zone mapping is important for connected and autonomous vehicles (CAVs) to navigate safely and smoothly through work zone areas. Cone-mounted ultra-wideband (UWB) roadside units (RSU) offer a cost-effective way for work zone layout inference, as roadside anchors and vehicle tags provide direct vehicle-to-infrastructure (V2I) range constraints for work zone geometry reconstruction. However, UWB range estimation is degraded by bursty outliers, non-line-of-sight (NLOS) errors, arbitrary anchor-ordering issues, and vehicle pose uncertainties in practical field deployments. To address these challenges, this study proposes a pose-conditioned, permutation-equivariant predictive denoiser for multi-anchor UWB ranging. The model employs shared anchor-wise temporal prediction to capture range dynamics, symmetric set aggregation to handle unordered and missing anchors, and pose-conditioned residual decoding to incorporate vehicle motion as a geometric prior. A two-stage training strategy first learns prediction from observed ranges, and then fine-tunes the denoiser with NLOS-weighted supervision. The method is evaluated on rare real-world V2I UWB field data collected with a CAV, as well as on controlled large-scale simulation benchmarks for ablative insights. Results show that the proposed method substantially improves range accuracy, cone localization, and work zone geometry reconstruction in challenging NLOS-dominated regimes, remains robust to anchor re-indexing and moderate anchor dropout, and reduces measurement-weighted field MSE by 66.9% relative to the raw input.
V2X-LLM: Enhancing V2X Integration and Understanding in Connected Vehicle Corridors
Mar 04, 2025



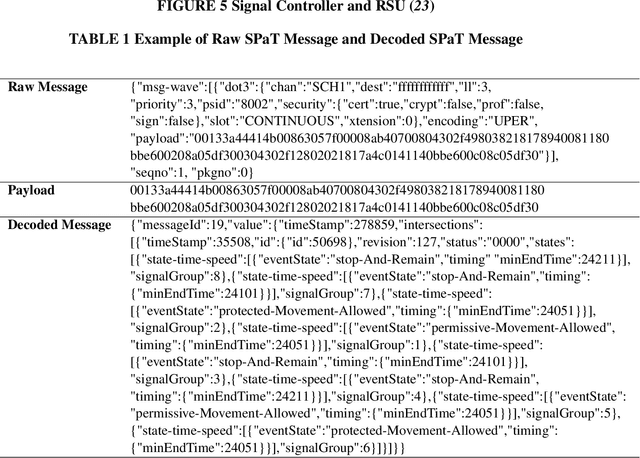
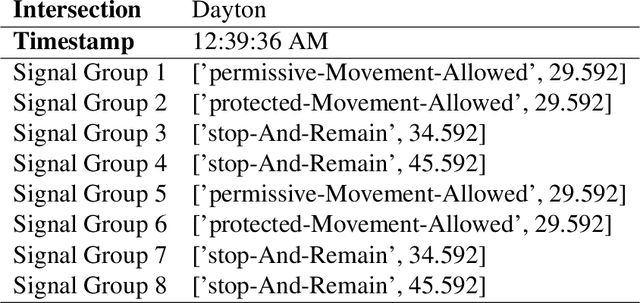
The advancement of Connected and Automated Vehicles (CAVs) and Vehicle-to-Everything (V2X) offers significant potential for enhancing transportation safety, mobility, and sustainability. However, the integration and analysis of the diverse and voluminous V2X data, including Basic Safety Messages (BSMs) and Signal Phase and Timing (SPaT) data, present substantial challenges, especially on Connected Vehicle Corridors. These challenges include managing large data volumes, ensuring real-time data integration, and understanding complex traffic scenarios. Although these projects have developed an advanced CAV data pipeline that enables real-time communication between vehicles, infrastructure, and other road users for managing connected vehicle and roadside unit (RSU) data, significant hurdles in data comprehension and real-time scenario analysis and reasoning persist. To address these issues, we introduce the V2X-LLM framework, a novel enhancement to the existing CV data pipeline. V2X-LLM leverages Large Language Models (LLMs) to improve the understanding and real-time analysis of V2X data. The framework includes four key tasks: Scenario Explanation, offering detailed narratives of traffic conditions; V2X Data Description, detailing vehicle and infrastructure statuses; State Prediction, forecasting future traffic states; and Navigation Advisory, providing optimized routing instructions. By integrating LLM-driven reasoning with V2X data within the data pipeline, the V2X-LLM framework offers real-time feedback and decision support for traffic management. This integration enhances the accuracy of traffic analysis, safety, and traffic optimization. Demonstrations in a real-world urban corridor highlight the framework's potential to advance intelligent transportation systems.
Real-World Data Inspired Interactive Connected Traffic Scenario Generation
Sep 25, 2024

Simulation is a crucial step in ensuring accurate, efficient, and realistic Connected and Autonomous Vehicles (CAVs) testing and validation. As the adoption of CAV accelerates, the integration of real-world data into simulation environments becomes increasingly critical. Among various technologies utilized by CAVs, Vehicle-to-Everything (V2X) communication plays a crucial role in ensuring a seamless transmission of information between CAVs, infrastructure, and other road users. However, most existing studies have focused on developing and testing communication protocols, resource allocation strategies, and data dissemination techniques in V2X. There is a gap where real-world V2X data is integrated into simulations to generate diverse and high-fidelity traffic scenarios. To fulfill this research gap, we leverage real-world Signal Phase and Timing (SPaT) data from Roadside Units (RSUs) to enhance the fidelity of CAV simulations. Moreover, we developed an algorithm that enables Autonomous Vehicles (AVs) to respond dynamically to real-time traffic signal data, simulating realistic V2X communication scenarios. Such high-fidelity simulation environments can generate multimodal data, including trajectory, semantic camera, depth camera, and bird's eye view data for various traffic scenarios. The generated scenarios and data provide invaluable insights into AVs' interactions with traffic infrastructure and other road users. This work aims to bridge the gap between theoretical research and practical deployment of CAVs, facilitating the development of smarter and safer transportation systems.