 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFollowGen: A Scaled Noise Conditional Diffusion Model for Car-Following Trajectory Prediction
Nov 23, 2024



Vehicle trajectory prediction is crucial for advancing autonomous driving and advanced driver assistance systems (ADAS). Although deep learning-based approaches - especially those utilizing transformer-based and generative models - have markedly improved prediction accuracy by capturing complex, non-linear patterns in vehicle dynamics and traffic interactions, they frequently overlook detailed car-following behaviors and the inter-vehicle interactions critical for real-world driving applications, particularly in fully autonomous or mixed traffic scenarios. To address the issue, this study introduces a scaled noise conditional diffusion model for car-following trajectory prediction, which integrates detailed inter-vehicular interactions and car-following dynamics into a generative framework, improving both the accuracy and plausibility of predicted trajectories. The model utilizes a novel pipeline to capture historical vehicle dynamics by scaling noise with encoded historical features within the diffusion process. Particularly, it employs a cross-attention-based transformer architecture to model intricate inter-vehicle dependencies, effectively guiding the denoising process and enhancing prediction accuracy. Experimental results on diverse real-world driving scenarios demonstrate the state-of-the-art performance and robustness of the proposed method.
Crossfusor: A Cross-Attention Transformer Enhanced Conditional Diffusion Model for Car-Following Trajectory Prediction
Jun 17, 2024



Vehicle trajectory prediction is crucial for advancing autonomous driving and advanced driver assistance systems (ADAS), enhancing road safety and traffic efficiency. While traditional methods have laid foundational work, modern deep learning techniques, particularly transformer-based models and generative approaches, have significantly improved prediction accuracy by capturing complex and non-linear patterns in vehicle motion and traffic interactions. However, these models often overlook the detailed car-following behaviors and inter-vehicle interactions essential for real-world driving scenarios. This study introduces a Cross-Attention Transformer Enhanced Conditional Diffusion Model (Crossfusor) specifically designed for car-following trajectory prediction. Crossfusor integrates detailed inter-vehicular interactions and car-following dynamics into a robust diffusion framework, improving both the accuracy and realism of predicted trajectories. The model leverages a novel temporal feature encoding framework combining GRU, location-based attention mechanisms, and Fourier embedding to capture historical vehicle dynamics. It employs noise scaled by these encoded historical features in the forward diffusion process, and uses a cross-attention transformer to model intricate inter-vehicle dependencies in the reverse denoising process. Experimental results on the NGSIM dataset demonstrate that Crossfusor outperforms state-of-the-art models, particularly in long-term predictions, showcasing its potential for enhancing the predictive capabilities of autonomous driving systems.
Optimizing Bus Travel: A Novel Approach to Feature Mining with P-KMEANS and P-LDA Algorithms
Dec 04, 2023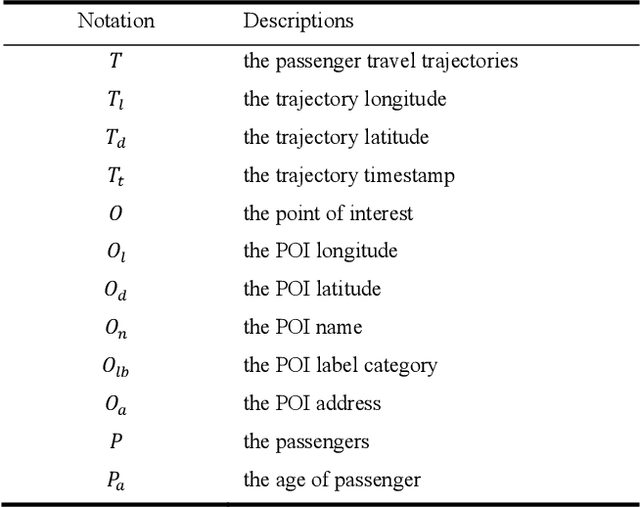
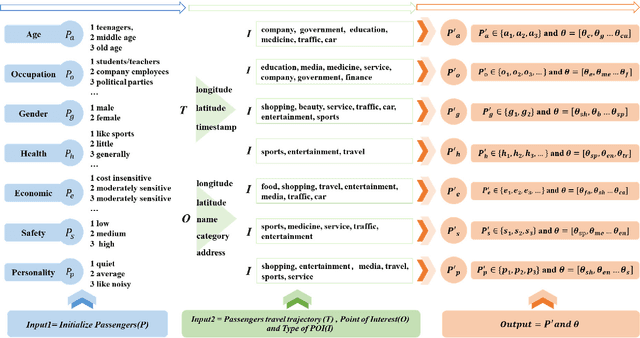
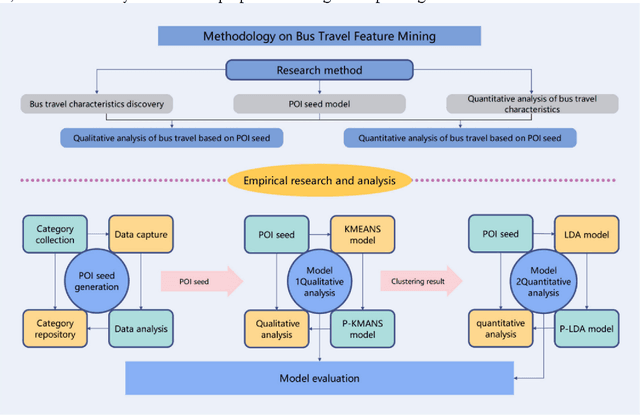
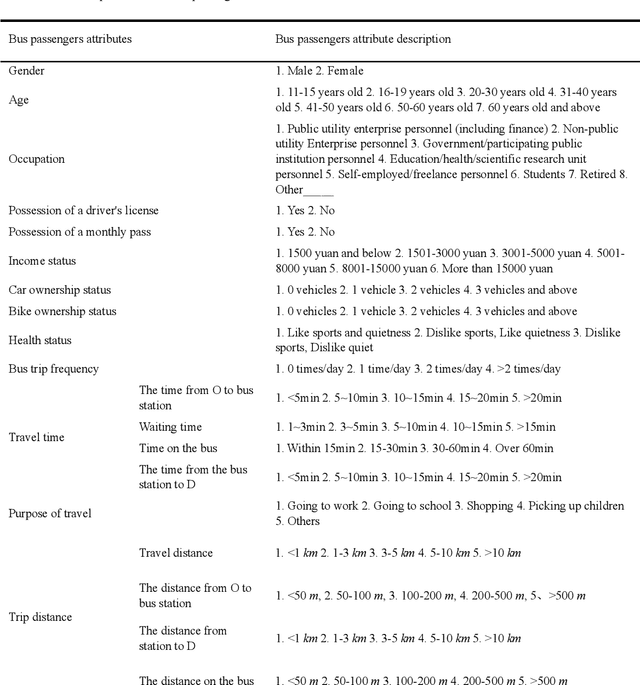
Customizing services for bus travel can bolster its attractiveness, optimize usage, alleviate traffic congestion, and diminish carbon emissions. This potential is realized by harnessing recent advancements in positioning communication facilities, the Internet of Things, and artificial intelligence for feature mining in public transportation. However, the inherent complexities of disorganized and unstructured public transportation data introduce substantial challenges to travel feature extraction. This study presents a bus travel feature extraction method rooted in Point of Interest (POI) data, employing enhanced P-KMENAS and P-LDA algorithms to overcome these limitations. While the KMEANS algorithm adeptly segments passenger travel paths into distinct clusters, its outcomes can be influenced by the initial K value. On the other hand, Latent Dirichlet Allocation (LDA) excels at feature identification and probabilistic interpretations yet encounters difficulties with feature intermingling and nuanced sub-feature interactions. Incorporating the POI dimension enhances our understanding of travel behavior, aligning it more closely with passenger attributes and facilitating easier data analysis. By incorporating POI data, our refined P-KMENAS and P-LDA algorithms grant a holistic insight into travel behaviors and attributes, effectively mitigating the limitations above. Consequently, this POI-centric algorithm effectively amalgamates diverse POI attributes, delineates varied travel contexts, and imparts probabilistic metrics to feature properties. Our method successfully mines the diverse aspects of bus travel, such as age, occupation, gender, sports, cost, safety, and personality traits. It effectively calculates relationships between individual travel behaviors and assigns explanatory and evaluative probabilities to POI labels, thereby enhancing bus travel optimization.