 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Vehicles' Longitudinal Trajectories and Lane Changes on Highway On-Ramps
Aug 23, 2021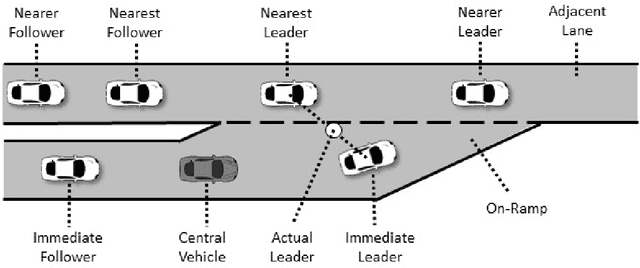
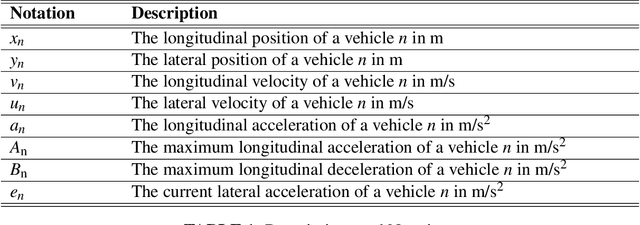
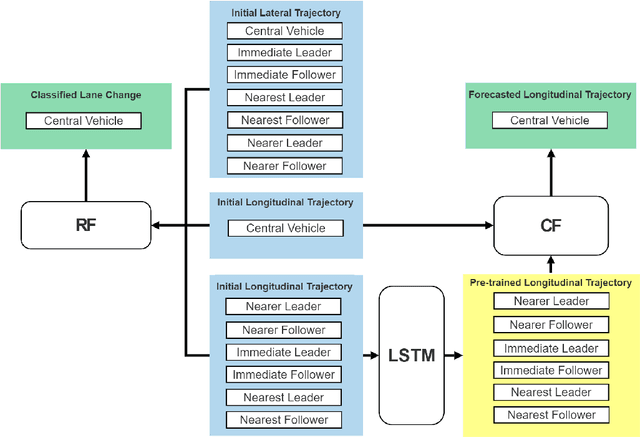

Vehicles on highway on-ramps are one of the leading contributors to congestion. In this paper, we propose a prediction framework that predicts the longitudinal trajectories and lane changes (LCs) of vehicles on highway on-ramps and tapers. Specifically, our framework adopts a combination of prediction models that inputs a 4 seconds duration of a trajectory to output a forecast of the longitudinal trajectories and LCs up to 15 seconds ahead. Training and Validation based on next generation simulation (NGSIM) data show that the prediction power of the developed model and its accuracy outperforms a traditional long-short term memory (LSTM) model. Ultimately, the work presented here can alleviate the congestion experienced on on-ramps, improve safety, and guide effective traffic control strategies.
A Prioritized Trajectory Planning Algorithm for Connected and Automated Vehicle Mandatory Lane Changes
Apr 21, 2021

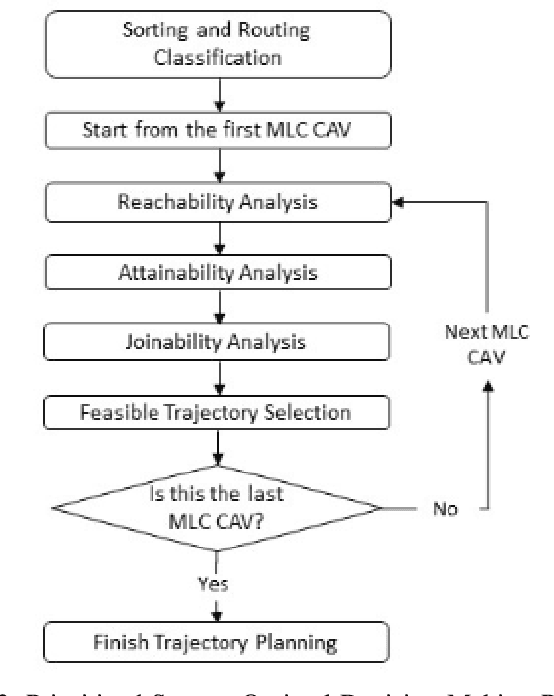

We introduce a prioritized system-optimal algorithm for mandatory lane change (MLC) behavior of connected and automated vehicles (CAV) from a dedicated lane. Our approach applies a cooperative lane change that prioritizes the decisions of lane changing vehicles which are closer to the end of the diverging zone (DZ), and optimizes the predicted total system travel time. Our experiments on synthetic data show that the proposed algorithm improves the traffic network efficiency by attaining higher speeds in the dedicated lane and earlier MLC positions while ensuring a low computational time. Our approach outperforms the traditional gap acceptance model.