 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSACA: A Scenario-Aware Collision Avoidance Framework for Autonomous Vehicles Integrating LLMs-Driven Reasoning
Mar 31, 2025Reliable collision avoidance under extreme situations remains a critical challenge for autonomous vehicles. While large language models (LLMs) offer promising reasoning capabilities, their application in safety-critical evasive maneuvers is limited by latency and robustness issues. Even so, LLMs stand out for their ability to weigh emotional, legal, and ethical factors, enabling socially responsible and context-aware collision avoidance. This paper proposes a scenario-aware collision avoidance (SACA) framework for extreme situations by integrating predictive scenario evaluation, data-driven reasoning, and scenario-preview-based deployment to improve collision avoidance decision-making. SACA consists of three key components. First, a predictive scenario analysis module utilizes obstacle reachability analysis and motion intention prediction to construct a comprehensive situational prompt. Second, an online reasoning module refines decision-making by leveraging prior collision avoidance knowledge and fine-tuning with scenario data. Third, an offline evaluation module assesses performance and stores scenarios in a memory bank. Additionally, A precomputed policy method improves deployability by previewing scenarios and retrieving or reasoning policies based on similarity and confidence levels. Real-vehicle tests show that, compared with baseline methods, SACA effectively reduces collision losses in extreme high-risk scenarios and lowers false triggering under complex conditions. Project page: https://sean-shiyuez.github.io/SACA/.
High-Speed Cornering Control and Real-Vehicle Deployment for Autonomous Electric Vehicles
Nov 18, 2024Executing drift maneuvers during high-speed cornering presents significant challenges for autonomous vehicles, yet offers the potential to minimize turning time and enhance driving dynamics. While reinforcement learning (RL) has shown promising results in simulated environments, discrepancies between simulations and real-world conditions have limited its practical deployment. This study introduces an innovative control framework that integrates trajectory optimization with drift maneuvers, aiming to improve the algorithm's adaptability for real-vehicle implementation. We leveraged Bezier-based pre-trajectory optimization to enhance rewards and optimize the controller through Twin Delayed Deep Deterministic Policy Gradient (TD3) in a simulated environment. For real-world deployment, we implement a hybrid RL-MPC fusion mechanism, , where TD3-derived maneuvers serve as primary inputs for a Model Predictive Controller (MPC). This integration enables precise real-time tracking of the optimal trajectory, with MPC providing corrective inputs to bridge the gap between simulation and reality. The efficacy of this method is validated through real-vehicle tests on consumer-grade electric vehicles, focusing on drift U-turns and drift right-angle turns. The control outcomes of these real-vehicle tests are thoroughly documented in the paper, supported by supplementary video evidence (https://youtu.be/5wp67FcpfL8). Notably, this study is the first to deploy and apply an RL-based transient drift cornering algorithm on consumer-grade electric vehicles.
The Internet of Federated Things : A Vision for the Future and In-depth Survey of Data-driven Approaches for Federated Learning
Nov 09, 2021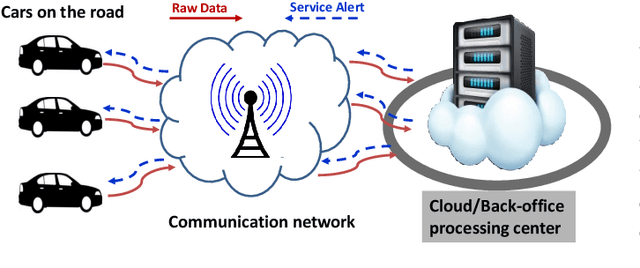
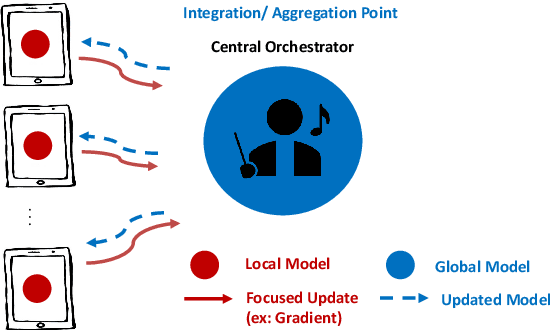
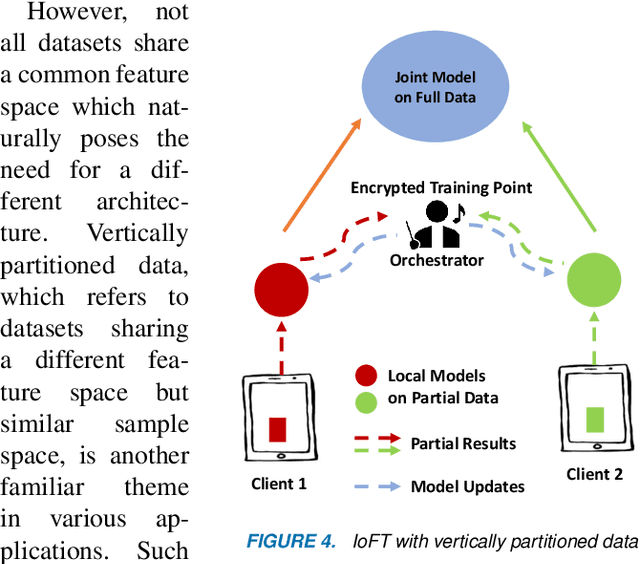
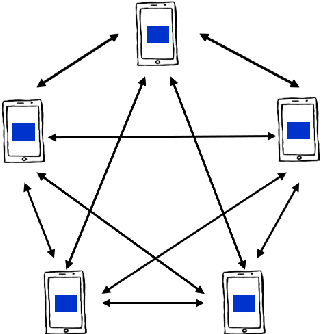
The Internet of Things (IoT) is on the verge of a major paradigm shift. In the IoT system of the future, IoFT, the cloud will be substituted by the crowd where model training is brought to the edge, allowing IoT devices to collaboratively extract knowledge and build smart analytics/models while keeping their personal data stored locally. This paradigm shift was set into motion by the tremendous increase in computational power on IoT devices and the recent advances in decentralized and privacy-preserving model training, coined as federated learning (FL). This article provides a vision for IoFT and a systematic overview of current efforts towards realizing this vision. Specifically, we first introduce the defining characteristics of IoFT and discuss FL data-driven approaches, opportunities, and challenges that allow decentralized inference within three dimensions: (i) a global model that maximizes utility across all IoT devices, (ii) a personalized model that borrows strengths across all devices yet retains its own model, (iii) a meta-learning model that quickly adapts to new devices or learning tasks. We end by describing the vision and challenges of IoFT in reshaping different industries through the lens of domain experts. Those industries include manufacturing, transportation, energy, healthcare, quality & reliability, business, and computing.
Adversarial Online Learning with Variable Plays in the Pursuit-Evasion Game: Theoretical Foundations and Application in Connected and Automated Vehicle Cybersecurity
Oct 26, 2021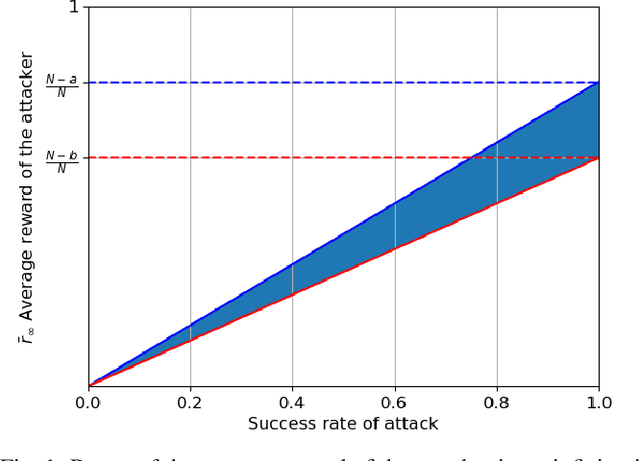
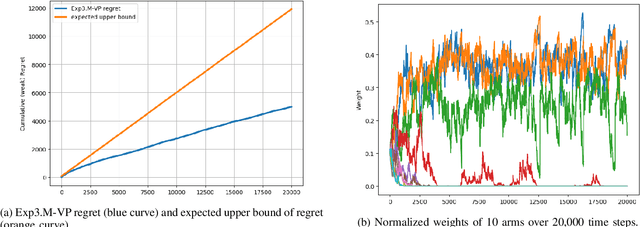
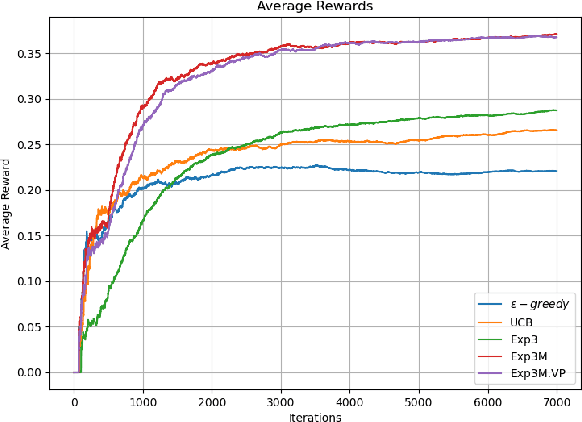
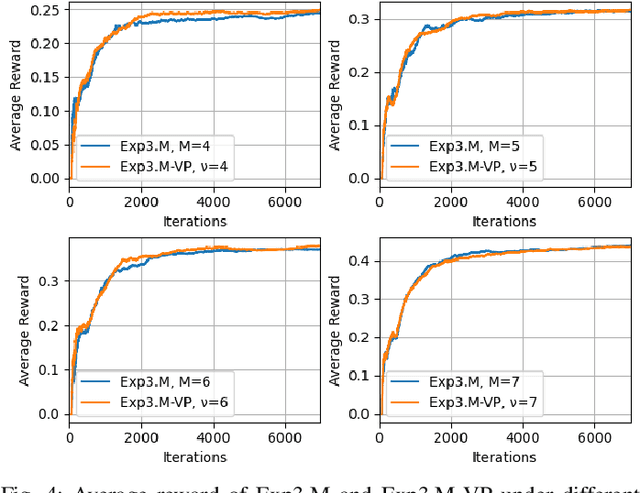
We extend the adversarial/non-stochastic multi-play multi-armed bandit (MPMAB) to the case where the number of arms to play is variable. The work is motivated by the fact that the resources allocated to scan different critical locations in an interconnected transportation system change dynamically over time and depending on the environment. By modeling the malicious hacker and the intrusion monitoring system as the attacker and the defender, respectively, we formulate the problem for the two players as a sequential pursuit-evasion game. We derive the condition under which a Nash equilibrium of the strategic game exists. For the defender side, we provide an exponential-weighted based algorithm with sublinear pseudo-regret. We further extend our model to heterogeneous rewards for both players, and obtain lower and upper bounds on the average reward for the attacker. We provide numerical experiments to demonstrate the effectiveness of a variable-arm play.
* Published in IEEE Access. DOI: 10.1109/ACCESS.2021.3120700
Anomaly Detection in Connected and Automated Vehicles using an Augmented State Formulation
Apr 18, 2020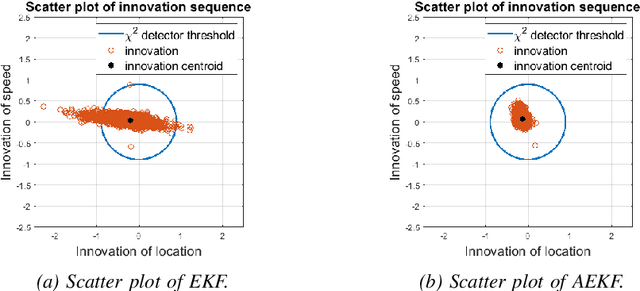
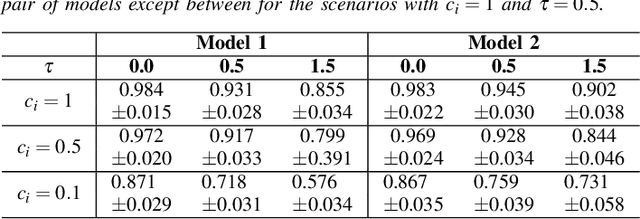
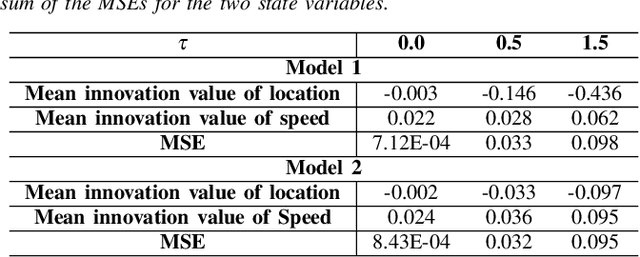
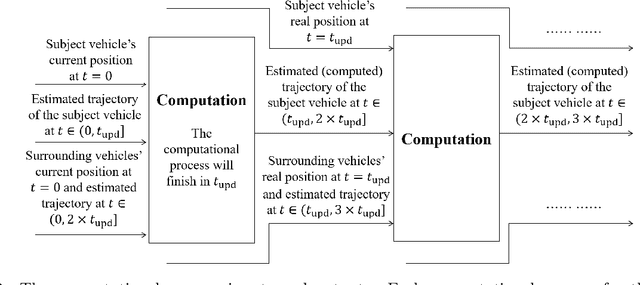
In this paper we propose a novel observer-based method for anomaly detection in connected and automated vehicles (CAVs). The proposed method utilizes an augmented extended Kalman filter (AEKF) to smooth sensor readings of a CAV based on a nonlinear car-following motion model with time delay, where the leading vehicle's trajectory is used by the subject vehicle to detect sensor anomalies. We use the classic $\chi^2$ fault detector in conjunction with the proposed AEKF for anomaly detection. To make the proposed model more suitable for real-world applications, we consider a stochastic communication time delay in the car-following model. Our experiments conducted on real-world connected vehicle data indicate that the AEKF with $\chi^2$-detector can achieve a high anomaly detection performance.
Trajectory Planning for Connected and Automated Vehicles: Cruising, Lane Changing, and Platooning
Jan 23, 2020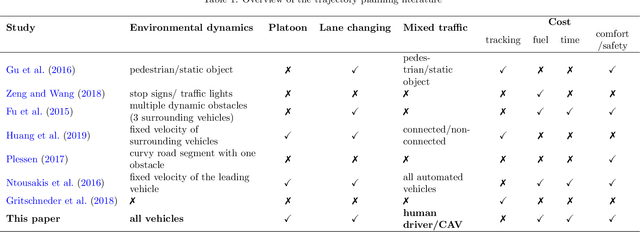
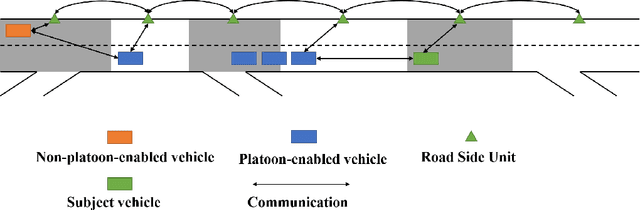
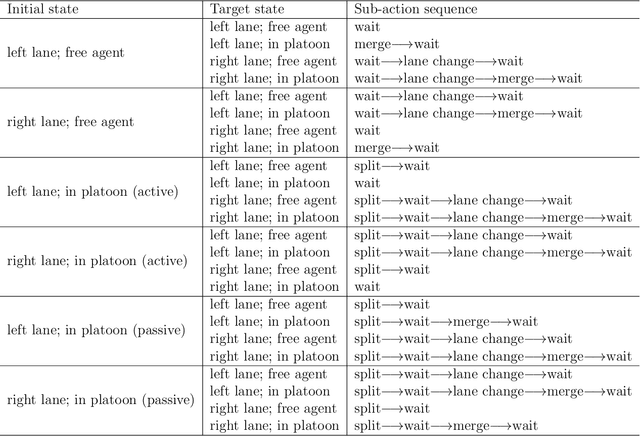
Autonomy and connectivity are considered among the most promising technologies to improve safety, mobility, fuel and time consumption in transportation systems. Some of the fuel efficiency benefits of connected and automated vehicles (CAVs) can be realized through platooning. A platoon is a virtual train of CAVs that travel together following the platoon head, with small gaps between them. Vehicles may also reduce travel time by lane changing. In this paper, we devise an optimal control-based trajectory planning model that can provide safe and efficient trajectories for the subject vehicle and can incorporate platooning and lane changing. We embed this trajectory planning model in a simulation framework to quantify its efficiency benefits as it relates to fuel consumption and travel time, in a dynamic traffic stream. Furthermore, we perform extensive numerical experiments to investigate whether, and the circumstances under which, the vehicles in upstream of the subject vehicle may also experience second-hand fuel efficiency benefits.
Real-Time Sensor Anomaly Detection and Recovery in Connected Automated Vehicle Sensors
Nov 04, 2019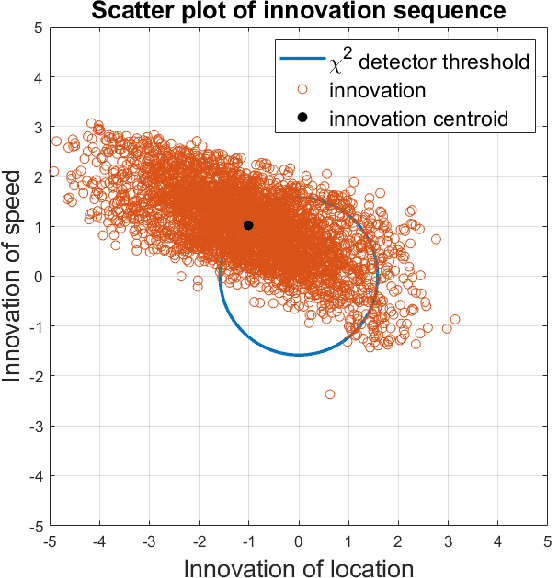
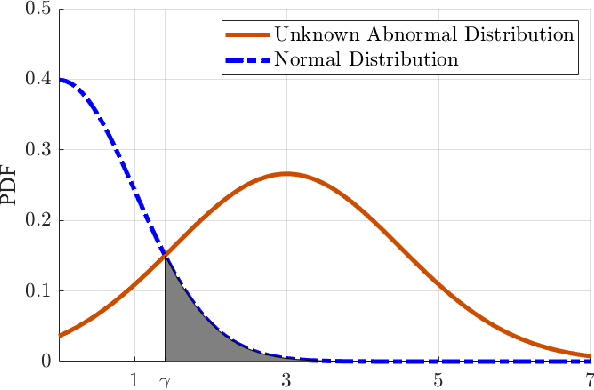
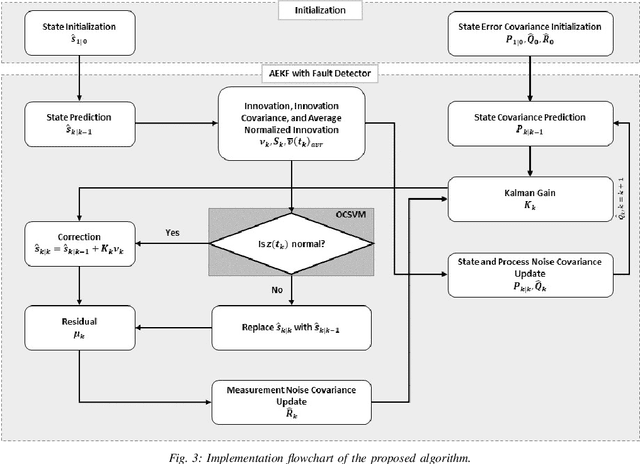
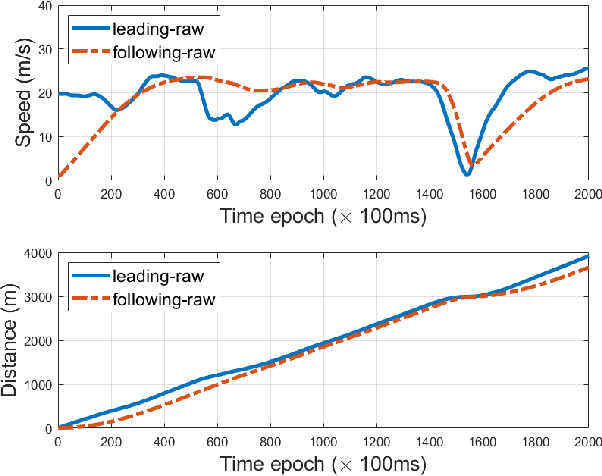
In this paper we propose a novel observer-based method to improve the safety and security of connected and automated vehicle (CAV) transportation. The proposed method combines model-based signal filtering and anomaly detection methods. Specifically, we use adaptive extended Kalman filter (AEKF) to smooth sensor readings of a CAV based on a nonlinear car-following model. Using the car-following model the subject vehicle (i.e., the following vehicle) utilizes the leading vehicle's information to detect sensor anomalies by employing previously-trained One Class Support Vector Machine (OCSVM) models. This approach allows the AEKF to estimate the state of a vehicle not only based on the vehicle's location and speed, but also by taking into account the state of the surrounding traffic. A communication time delay factor is considered in the car-following model to make it more suitable for real-world applications. Our experiments show that compared with the AEKF with a traditional $\chi^2$-detector, our proposed method achieves a better anomaly detection performance. We also demonstrate that a larger time delay factor has a negative impact on the overall detection performance.