 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHidden Markov models are recurrent neural networks: A disease progression modeling application
Jun 04, 2020
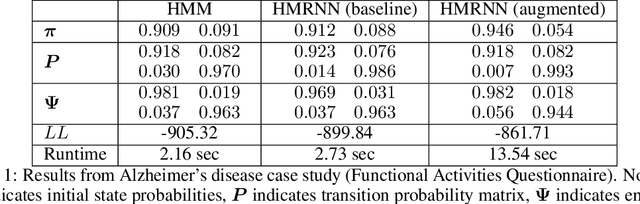
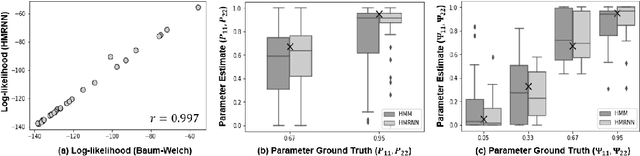
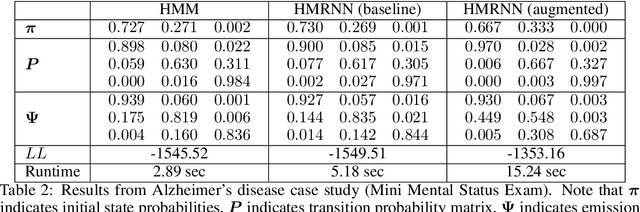
Hidden Markov models (HMMs) are commonly used for sequential data modeling when the true state of the system is not fully known. We formulate a special case of recurrent neural networks (RNNs), which we name hidden Markov recurrent neural networks (HMRNNs), and prove that each HMRNN has the same likelihood function as a corresponding discrete-observation HMM. We experimentally validate this theoretical result on synthetic datasets by showing that parameter estimates from HMRNNs are numerically close to those obtained from HMMs via the Baum-Welch algorithm. We demonstrate our method's utility in a case study on Alzheimer's disease progression, in which we augment HMRNNs with other predictive neural networks. The augmented HMRNN yields parameter estimates that offer a novel clinical interpretation and fit the patient data better than HMM parameter estimates from the Baum-Welch algorithm.
Anomaly Detection in Connected and Automated Vehicles using an Augmented State Formulation
Apr 18, 2020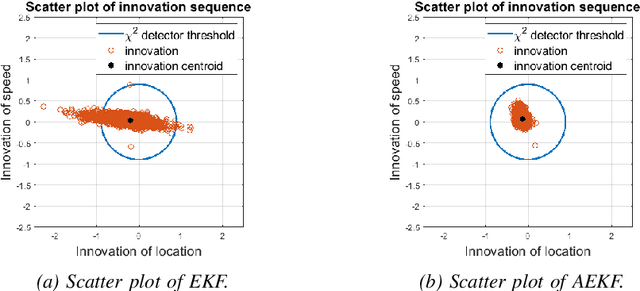
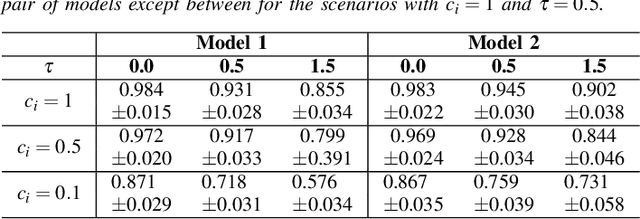
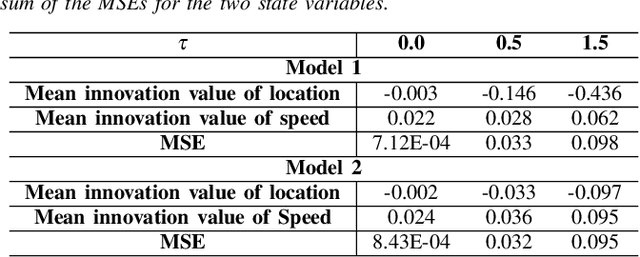
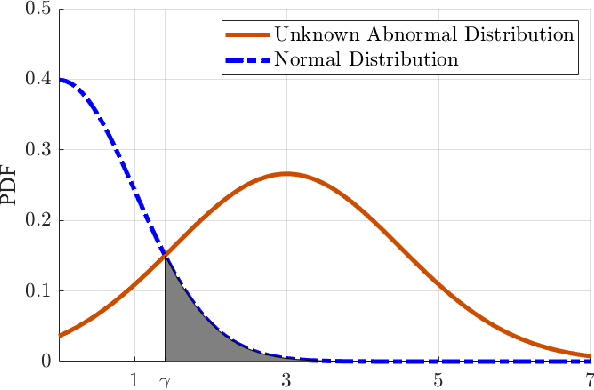
In this paper we propose a novel observer-based method for anomaly detection in connected and automated vehicles (CAVs). The proposed method utilizes an augmented extended Kalman filter (AEKF) to smooth sensor readings of a CAV based on a nonlinear car-following motion model with time delay, where the leading vehicle's trajectory is used by the subject vehicle to detect sensor anomalies. We use the classic $\chi^2$ fault detector in conjunction with the proposed AEKF for anomaly detection. To make the proposed model more suitable for real-world applications, we consider a stochastic communication time delay in the car-following model. Our experiments conducted on real-world connected vehicle data indicate that the AEKF with $\chi^2$-detector can achieve a high anomaly detection performance.
Real-Time Sensor Anomaly Detection and Recovery in Connected Automated Vehicle Sensors
Nov 04, 2019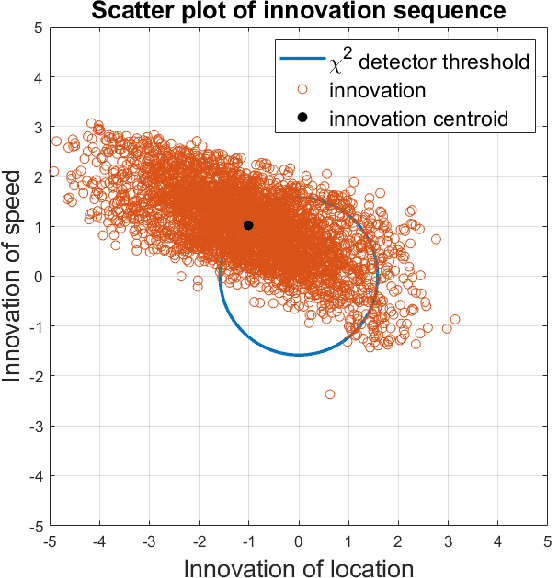
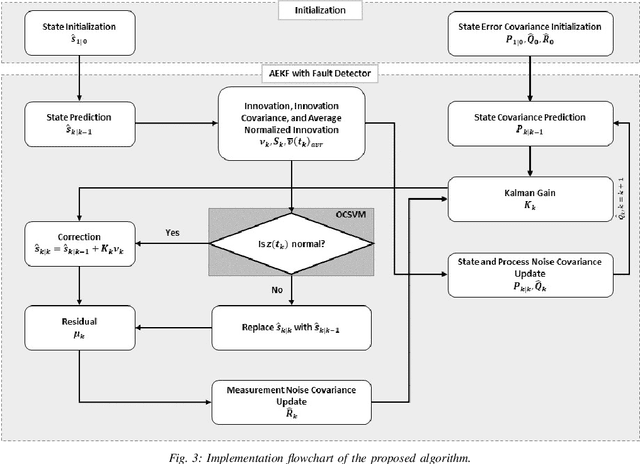
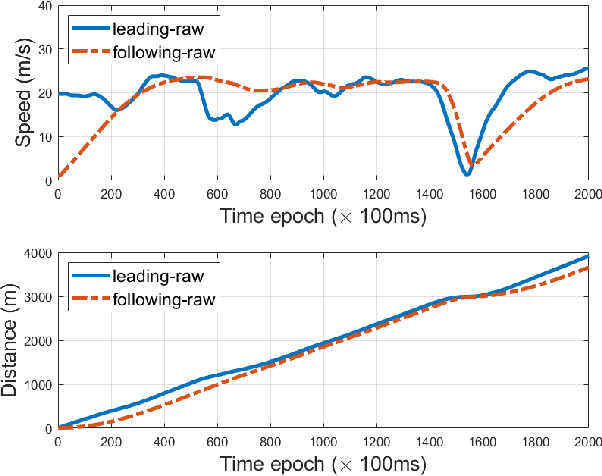
In this paper we propose a novel observer-based method to improve the safety and security of connected and automated vehicle (CAV) transportation. The proposed method combines model-based signal filtering and anomaly detection methods. Specifically, we use adaptive extended Kalman filter (AEKF) to smooth sensor readings of a CAV based on a nonlinear car-following model. Using the car-following model the subject vehicle (i.e., the following vehicle) utilizes the leading vehicle's information to detect sensor anomalies by employing previously-trained One Class Support Vector Machine (OCSVM) models. This approach allows the AEKF to estimate the state of a vehicle not only based on the vehicle's location and speed, but also by taking into account the state of the surrounding traffic. A communication time delay factor is considered in the car-following model to make it more suitable for real-world applications. Our experiments show that compared with the AEKF with a traditional $\chi^2$-detector, our proposed method achieves a better anomaly detection performance. We also demonstrate that a larger time delay factor has a negative impact on the overall detection performance.