 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Big-Data Driven Framework to Estimating Vehicle Volume based on Mobile Device Location Data
Jan 24, 2023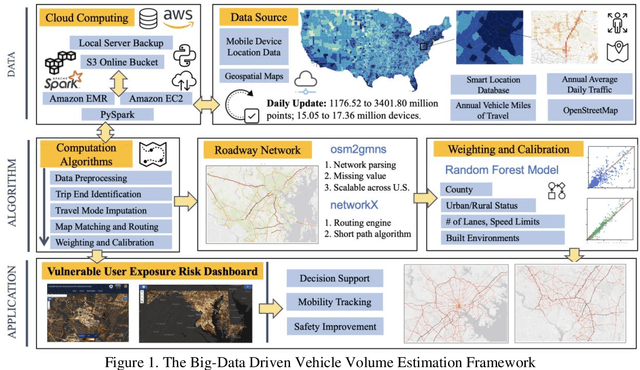
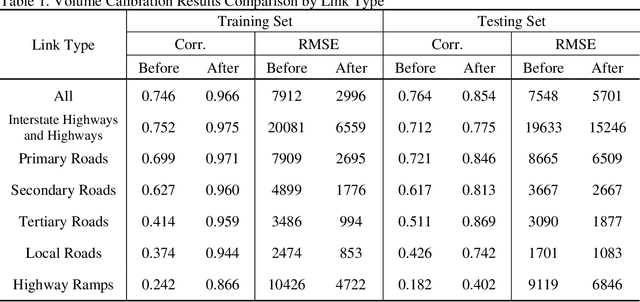
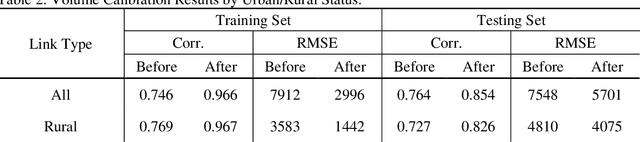
Vehicle volume serves as a critical metric and the fundamental basis for traffic signal control, transportation project prioritization, road maintenance plans and more. Traditional methods of quantifying vehicle volume rely on manual counting, video cameras, and loop detectors at a limited number of locations. These efforts require significant labor and cost for expansions. Researchers and private sector companies have also explored alternative solutions such as probe vehicle data, while still suffering from a low penetration rate. In recent years, along with the technological advancement in mobile sensors and mobile networks, Mobile Device Location Data (MDLD) have been growing dramatically in terms of the spatiotemporal coverage of the population and its mobility. This paper presents a big-data driven framework that can ingest terabytes of MDLD and estimate vehicle volume at a larger geographical area with a larger sample size. The proposed framework first employs a series of cloud-based computational algorithms to extract multimodal trajectories and trip rosters. A scalable map matching and routing algorithm is then applied to snap and route vehicle trajectories to the roadway network. The observed vehicle counts on each roadway segment are weighted and calibrated against ground truth control totals, i.e., Annual Vehicle-Miles of Travel (AVMT), and Annual Average Daily Traffic (AADT). The proposed framework is implemented on the all-street network in the state of Maryland using MDLD for the entire year of 2019. Results indicate that our proposed framework produces reliable vehicle volume estimates and also demonstrate its transferability and the generalization ability.
Trajectory Planning for Connected and Automated Vehicles: Cruising, Lane Changing, and Platooning
Jan 23, 2020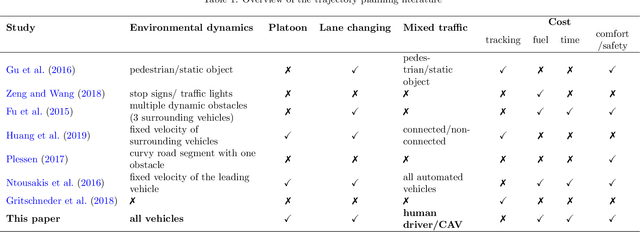
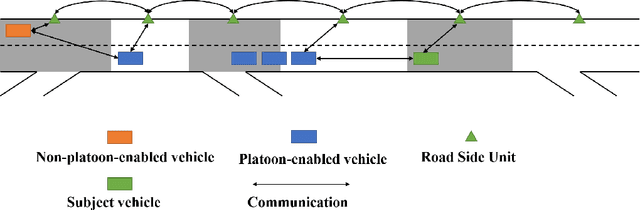
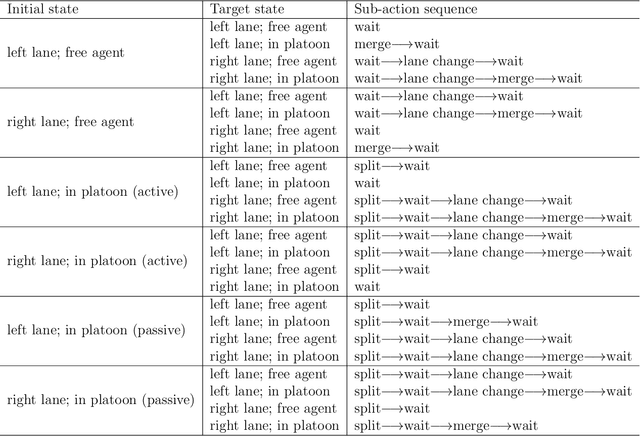
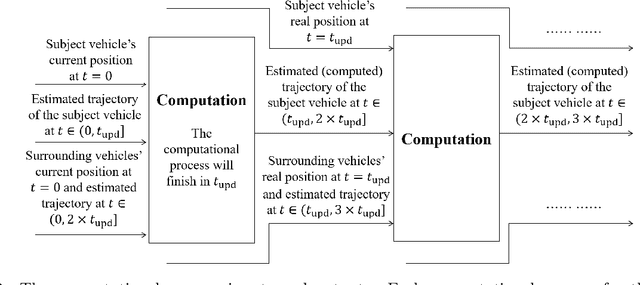
Autonomy and connectivity are considered among the most promising technologies to improve safety, mobility, fuel and time consumption in transportation systems. Some of the fuel efficiency benefits of connected and automated vehicles (CAVs) can be realized through platooning. A platoon is a virtual train of CAVs that travel together following the platoon head, with small gaps between them. Vehicles may also reduce travel time by lane changing. In this paper, we devise an optimal control-based trajectory planning model that can provide safe and efficient trajectories for the subject vehicle and can incorporate platooning and lane changing. We embed this trajectory planning model in a simulation framework to quantify its efficiency benefits as it relates to fuel consumption and travel time, in a dynamic traffic stream. Furthermore, we perform extensive numerical experiments to investigate whether, and the circumstances under which, the vehicles in upstream of the subject vehicle may also experience second-hand fuel efficiency benefits.