 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKinematics-aware Trajectory Generation and Prediction with Latent Stochastic Differential Modeling
Sep 17, 2023Trajectory generation and trajectory prediction are two critical tasks for autonomous vehicles, which generate various trajectories during development and predict the trajectories of surrounding vehicles during operation, respectively. However, despite significant advances in improving their performance, it remains a challenging problem to ensure that the generated/predicted trajectories are realistic, explainable, and physically feasible. Existing model-based methods provide explainable results, but are constrained by predefined model structures, limiting their capabilities to address complex scenarios. Conversely, existing deep learning-based methods have shown great promise in learning various traffic scenarios and improving overall performance, but they often act as opaque black boxes and lack explainability. In this work, we integrate kinematic knowledge with neural stochastic differential equations (SDE) and develop a variational autoencoder based on a novel latent kinematics-aware SDE (LK-SDE) to generate vehicle motions. Our approach combines the advantages of both model-based and deep learning-based techniques. Experimental results demonstrate that our method significantly outperforms baseline approaches in producing realistic, physically-feasible, and precisely-controllable vehicle trajectories, benefiting both generation and prediction tasks.
Safety-Assured Speculative Planning with Adaptive Prediction
Jul 21, 2023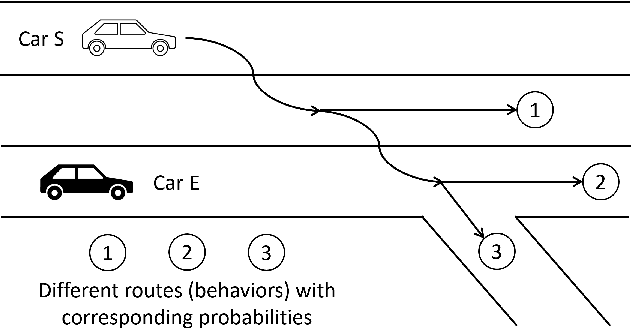
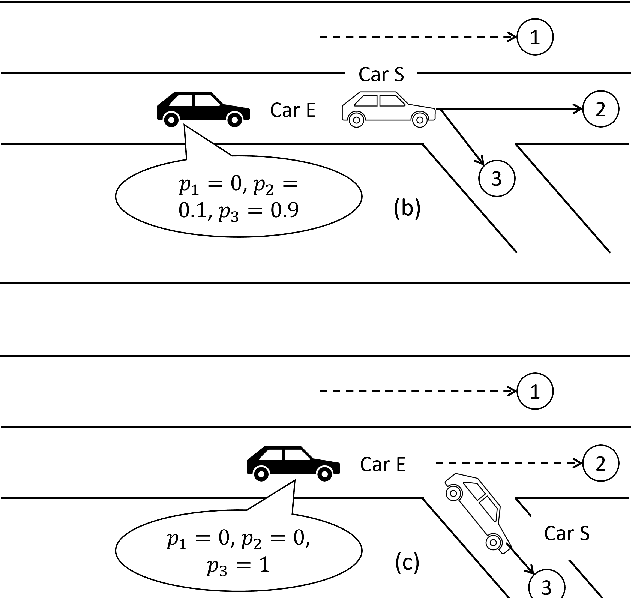
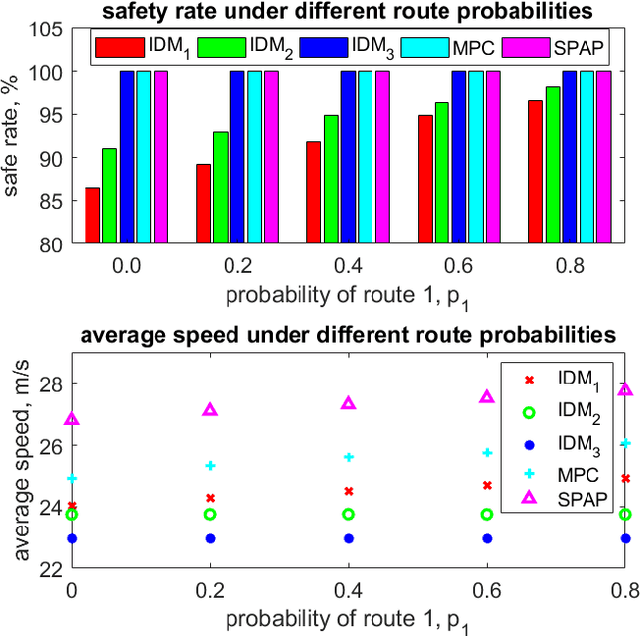
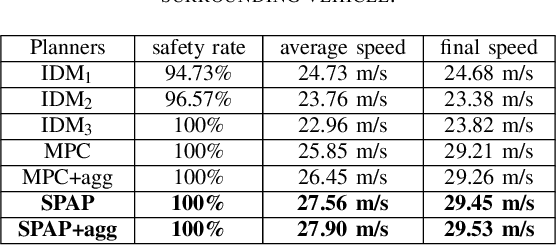
Recently significant progress has been made in vehicle prediction and planning algorithms for autonomous driving. However, it remains quite challenging for an autonomous vehicle to plan its trajectory in complex scenarios when it is difficult to accurately predict its surrounding vehicles' behaviors and trajectories. In this work, to maximize performance while ensuring safety, we propose a novel speculative planning framework based on a prediction-planning interface that quantifies both the behavior-level and trajectory-level uncertainties of surrounding vehicles. Our framework leverages recent prediction algorithms that can provide one or more possible behaviors and trajectories of the surrounding vehicles with probability estimation. It adapts those predictions based on the latest system states and traffic environment, and conducts planning to maximize the expected reward of the ego vehicle by considering the probabilistic predictions of all scenarios and ensure system safety by ruling out actions that may be unsafe in worst case. We demonstrate the effectiveness of our approach in improving system performance and ensuring system safety over other baseline methods, via extensive simulations in SUMO on a challenging multi-lane highway lane-changing case study.
Learning Representation for Anomaly Detection of Vehicle Trajectories
Mar 09, 2023Predicting the future trajectories of surrounding vehicles based on their history trajectories is a critical task in autonomous driving. However, when small crafted perturbations are introduced to those history trajectories, the resulting anomalous (or adversarial) trajectories can significantly mislead the future trajectory prediction module of the ego vehicle, which may result in unsafe planning and even fatal accidents. Therefore, it is of great importance to detect such anomalous trajectories of the surrounding vehicles for system safety, but few works have addressed this issue. In this work, we propose two novel methods for learning effective and efficient representations for online anomaly detection of vehicle trajectories. Different from general time-series anomaly detection, anomalous vehicle trajectory detection deals with much richer contexts on the road and fewer observable patterns on the anomalous trajectories themselves. To address these challenges, our methods exploit contrastive learning techniques and trajectory semantics to capture the patterns underlying the driving scenarios for effective anomaly detection under supervised and unsupervised settings, respectively. We conduct extensive experiments to demonstrate that our supervised method based on contrastive learning and unsupervised method based on reconstruction with semantic latent space can significantly improve the performance of anomalous trajectory detection in their corresponding settings over various baseline methods. We also demonstrate our methods' generalization ability to detect unseen patterns of anomalies.
Interactive Trajectory Planner for Mandatory Lane Changing in Dense Non-Cooperative Traffic
Mar 04, 2023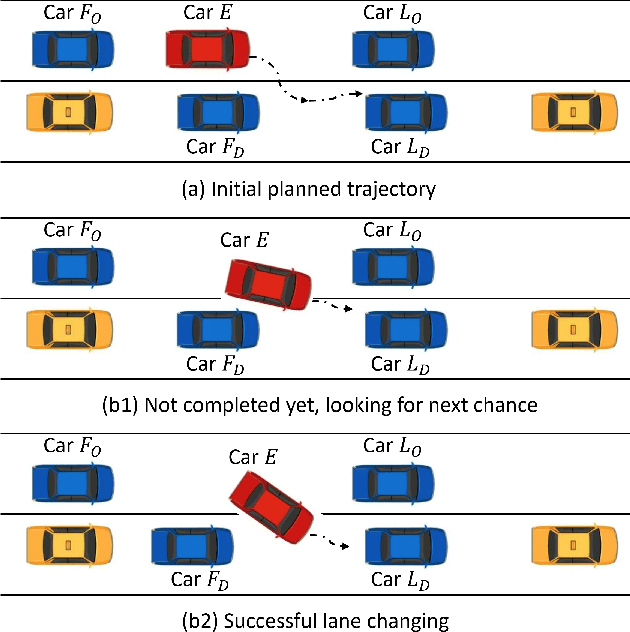
When the traffic stream is extremely congested and surrounding vehicles are not cooperative, the mandatory lane changing can be significantly difficult. In this work, we propose an interactive trajectory planner, which will firstly attempt to change lanes as long as safety is ensured. Based on receding horizon planning, the ego vehicle can abort or continue changing lanes according to surrounding vehicles' reactions. We demonstrate the performance of our planner in extensive simulations with eight surrounding vehicles, initial velocity ranging from 0.5 to 5 meters per second, and bumper to bumper gap ranging from 4 to 10 meters. The ego vehicle with our planner can change lanes safely and smoothly. The computation time of the planner at every step is within 10 milliseconds in most cases on a laptop with 1.8GHz Intel Core i7-10610U.
Connectivity Enhanced Safe Neural Network Planner for Lane Changing in Mixed Traffic
Feb 06, 2023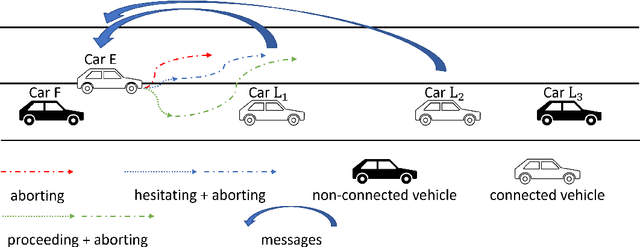
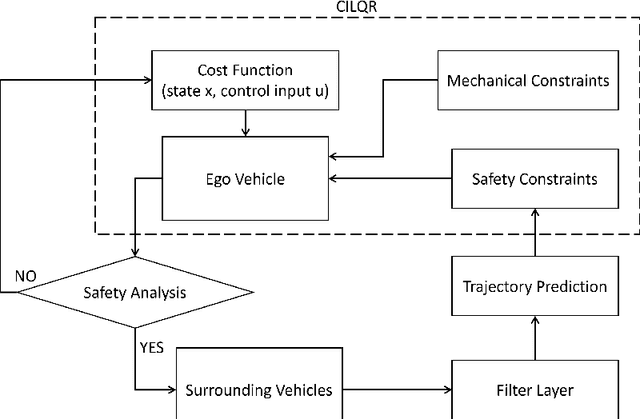
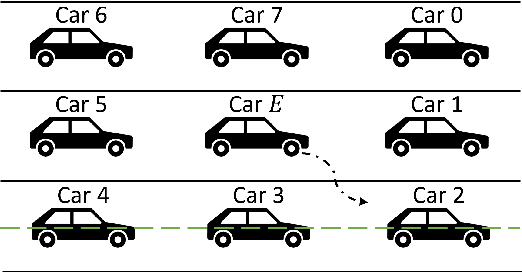
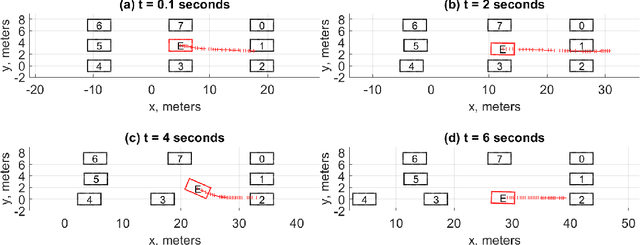
Connectivity technology has shown great potentials in improving the safety and efficiency of transportation systems by providing information beyond the perception and prediction capabilities of individual vehicles. However, it is expected that human-driven and autonomous vehicles, and connected and non-connected vehicles need to share the transportation network during the transition period to fully connected and automated transportation systems. Such mixed traffic scenarios significantly increase the complexity in analyzing system behavior and quantifying uncertainty for highly interactive scenarios, e.g., lane changing. It is even harder to ensure system safety when neural network based planners are leveraged to further improve efficiency. In this work, we propose a connectivity-enhanced neural network based lane changing planner. By cooperating with surrounding connected vehicles in dynamic environment, our proposed planner will adapt its planned trajectory according to the analysis of a safe evasion trajectory. We demonstrate the strength of our planner design in improving efficiency and ensuring safety in various mixed traffic scenarios with extensive simulations. We also analyze the system robustness when the communication or coordination is not perfect.
Semi-supervised Semantics-guided Adversarial Training for Trajectory Prediction
May 27, 2022



Predicting the trajectories of surrounding objects is a critical task in self-driving and many other autonomous systems. Recent works demonstrate that adversarial attacks on trajectory prediction, where small crafted perturbations are introduced to history trajectories, may significantly mislead the prediction of future trajectories and ultimately induce unsafe planning. However, few works have addressed enhancing the robustness of this important safety-critical task. In this paper, we present the first adversarial training method for trajectory prediction. Compared with typical adversarial training on image tasks, our work is challenged by more random inputs with rich context, and a lack of class labels. To address these challenges, we propose a method based on a semi-supervised adversarial autoencoder that models disentangled semantic features with domain knowledge and provides additional latent labels for the adversarial training. Extensive experiments with different types of attacks demonstrate that our semi-supervised semantics-guided adversarial training method can effectively mitigate the impact of adversarial attacks and generally improve the system's adversarial robustness to a variety of attacks, including unseen ones. We believe that such semantics-guided architecture and advancement in robust generalization is an important step for developing robust prediction models and enabling safe decision making.
TAE: A Semi-supervised Controllable Behavior-aware Trajectory Generator and Predictor
Mar 02, 2022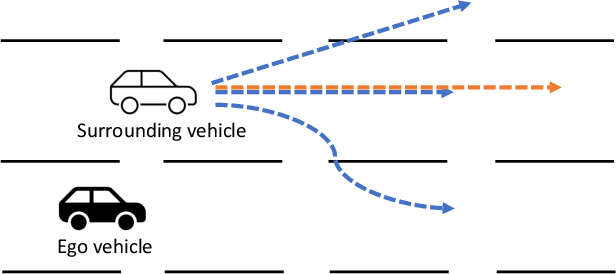
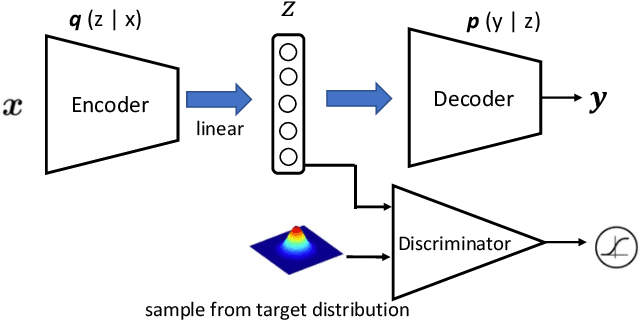
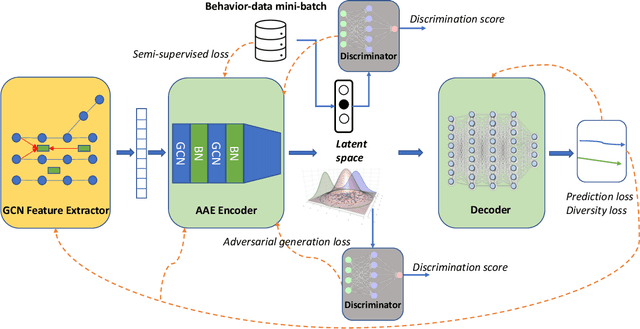
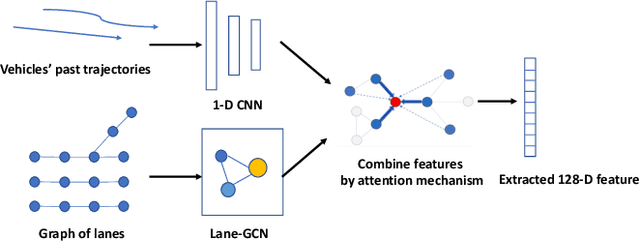
Trajectory generation and prediction are two interwoven tasks that play important roles in planner evaluation and decision making for intelligent vehicles. Most existing methods focus on one of the two and are optimized to directly output the final generated/predicted trajectories, which only contain limited information for critical scenario augmentation and safe planning. In this work, we propose a novel behavior-aware Trajectory Autoencoder (TAE) that explicitly models drivers' behavior such as aggressiveness and intention in the latent space, using semi-supervised adversarial autoencoder and domain knowledge in transportation. Our model addresses trajectory generation and prediction in a unified architecture and benefits both tasks: the model can generate diverse, controllable and realistic trajectories to enhance planner optimization in safety-critical and long-tailed scenarios, and it can provide prediction of critical behavior in addition to the final trajectories for decision making. Experimental results demonstrate that our method achieves promising performance on both trajectory generation and prediction.
Physics-Aware Safety-Assured Design of Hierarchical Neural Network based Planner
Jan 22, 2022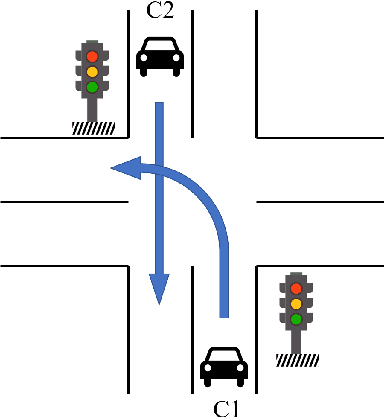

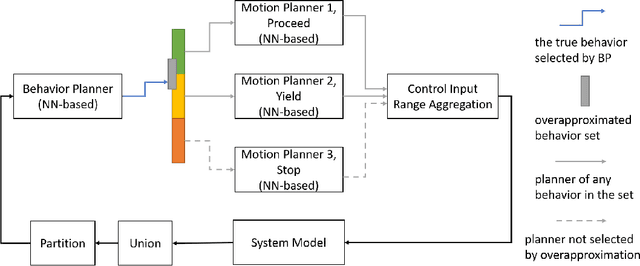
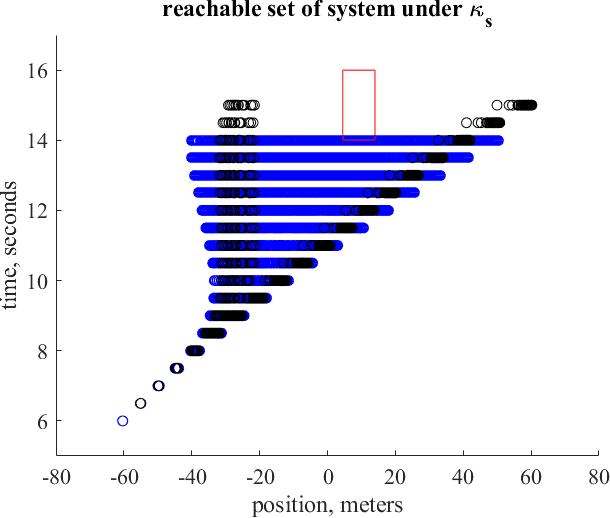
Neural networks have shown great promises in planning, control, and general decision making for learning-enabled cyber-physical systems (LE-CPSs), especially in improving performance under complex scenarios. However, it is very challenging to formally analyze the behavior of neural network based planners for ensuring system safety, which significantly impedes their applications in safety-critical domains such as autonomous driving. In this work, we propose a hierarchical neural network based planner that analyzes the underlying physical scenarios of the system and learns a system-level behavior planning scheme with multiple scenario-specific motion-planning strategies. We then develop an efficient verification method that incorporates overapproximation of the system state reachable set and novel partition and union techniques for formally ensuring system safety under our physics-aware planner. With theoretical analysis, we show that considering the different physical scenarios and building a hierarchical planner based on such analysis may improve system safety and verifiability. We also empirically demonstrate the effectiveness of our approach and its advantage over other baselines in practical case studies of unprotected left turn and highway merging, two common challenging safety-critical tasks in autonomous driving.
Neural Network based Interactive Lane Changing Planner in Dense Traffic with Safety Guarantee
Jan 22, 2022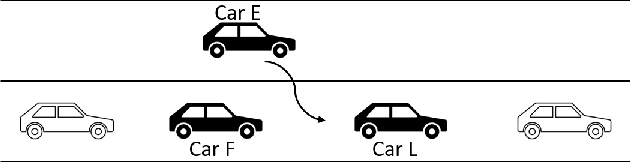

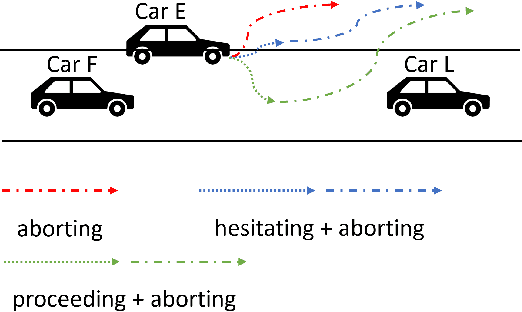
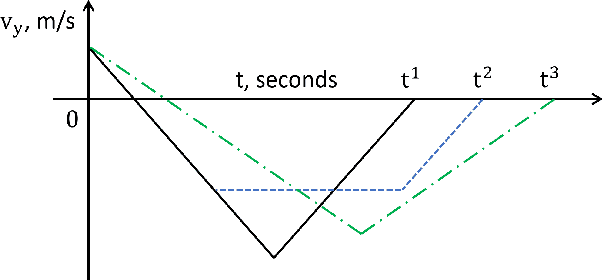
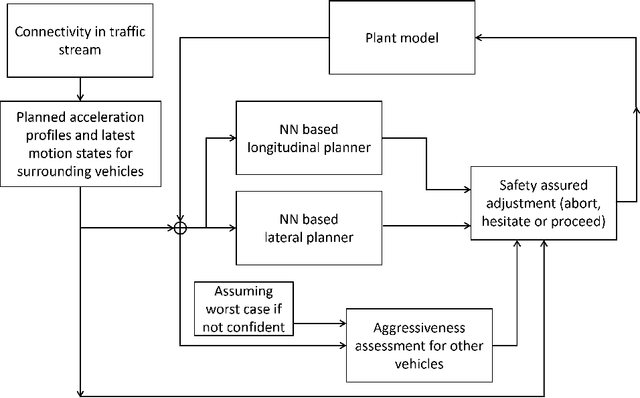
Neural network based planners have shown great promises in improving performance and task success rate in autonomous driving. However, it is very challenging to ensure safety of the system with learning enabled components, especially in dense and highly interactive traffic environments. In this work, we propose a neural network based lane changing planner framework that can ensure safety while sustaining system efficiency. To prevent too conservative planning, we assess the aggressiveness and identify the driving behavior of surrounding vehicles, then adapt the planned trajectory for the ego vehicle accordingly. The ego vehicle can proceed to change lanes if a safe evasion trajectory exists even in the worst case, otherwise, it can hesitate around current lateral position or return back to the original lane. We also quantitatively demonstrate the effectiveness of our planner design and its advantage over other baselines through extensive simulations with diverse and comprehensive experimental settings.
Trajectory Planning for Connected and Automated Vehicles: Cruising, Lane Changing, and Platooning
Jan 23, 2020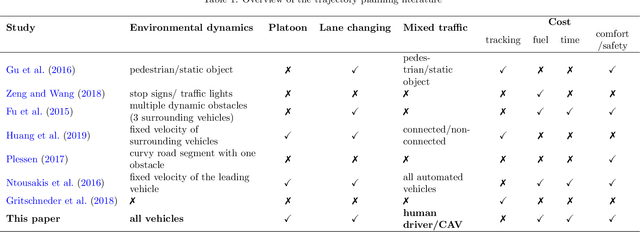
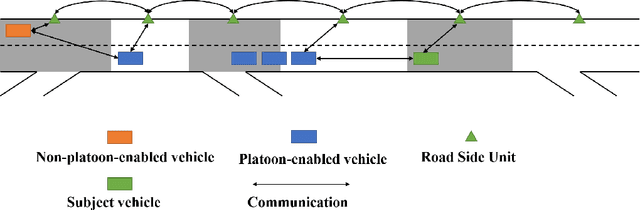
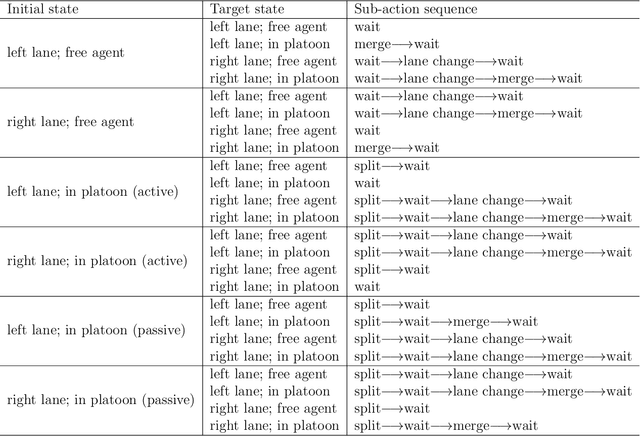
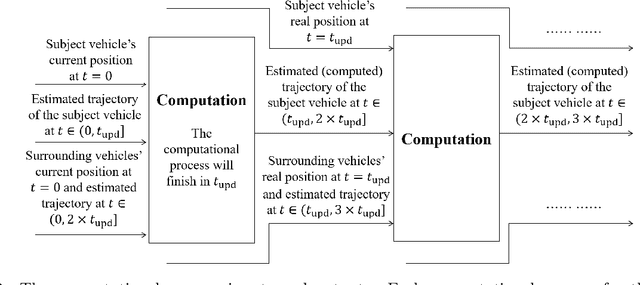
Autonomy and connectivity are considered among the most promising technologies to improve safety, mobility, fuel and time consumption in transportation systems. Some of the fuel efficiency benefits of connected and automated vehicles (CAVs) can be realized through platooning. A platoon is a virtual train of CAVs that travel together following the platoon head, with small gaps between them. Vehicles may also reduce travel time by lane changing. In this paper, we devise an optimal control-based trajectory planning model that can provide safe and efficient trajectories for the subject vehicle and can incorporate platooning and lane changing. We embed this trajectory planning model in a simulation framework to quantify its efficiency benefits as it relates to fuel consumption and travel time, in a dynamic traffic stream. Furthermore, we perform extensive numerical experiments to investigate whether, and the circumstances under which, the vehicles in upstream of the subject vehicle may also experience second-hand fuel efficiency benefits.