 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKernelEvolve: Scaling Agentic Kernel Coding for Heterogeneous AI Accelerators at Meta
Dec 30, 2025Making deep learning recommendation model (DLRM) training and inference fast and efficient is important. However, this presents three key system challenges - model architecture diversity, kernel primitive diversity, and hardware generation and architecture heterogeneity. This paper presents KernelEvolve-an agentic kernel coding framework-to tackle heterogeneity at-scale for DLRM. KernelEvolve is designed to take kernel specifications as input and automate the process of kernel generation and optimization for recommendation model across heterogeneous hardware architectures. KernelEvolve does so by operating at multiple programming abstractions, from Triton and CuTe DSL to low-level hardware agnostic languages, spanning the full hardware-software optimization stack. The kernel optimization process is described as graph-based search with selection policy, universal operator, fitness function, and termination rule, dynamically adapts to runtime execution context through retrieval-augmented prompt synthesis. We designed, implemented, and deployed KernelEvolve to optimize a wide variety of production recommendation models across generations of NVIDIA and AMD GPUs, as well as Meta's AI accelerators. We validate KernelEvolve on the publicly-available KernelBench suite, achieving 100% pass rate on all 250 problems across three difficulty levels, and 160 PyTorch ATen operators across three heterogeneous hardware platforms, demonstrating 100% correctness. KernelEvolve reduces development time from weeks to hours and achieves substantial performance improvements over PyTorch baselines across diverse production use cases and for heterogeneous AI systems at-scale. Beyond performance efficiency improvements, KernelEvolve significantly mitigates the programmability barrier for new AI hardware by enabling automated kernel generation for in-house developed AI hardware.
Towards Fine-Grained Recognition with Large Visual Language Models: Benchmark and Optimization Strategies
Dec 11, 2025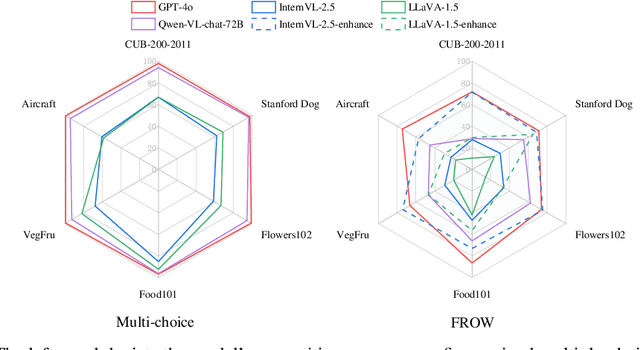



Large Vision Language Models (LVLMs) have made remarkable progress, enabling sophisticated vision-language interaction and dialogue applications. However, existing benchmarks primarily focus on reasoning tasks, often neglecting fine-grained recognition, which is crucial for practical application scenarios. To address this gap, we introduce the Fine-grained Recognition Open World (FROW) benchmark, designed for detailed evaluation of LVLMs with GPT-4o. On the basis of that, we propose a novel optimization strategy from two perspectives: \textit{data construction} and \textit{training process}, to improve the performance of LVLMs. Our dataset includes mosaic data, which combines multiple short-answer responses, and open-world data, generated from real-world questions and answers using GPT-4o, creating a comprehensive framework for evaluating fine-grained recognition in LVLMs. Experiments show that mosaic data improves category recognition accuracy by 1\% and open-world data boosts FROW benchmark accuracy by 10\%-20\% and content accuracy by 6\%-12\%. Meanwhile, incorporating fine-grained data into the pre-training phase can improve the model's category recognition accuracy by up to 10\%. The benchmark will be available at https://github.com/pc-inno/FROW.
Towards Fair Class-wise Robustness: Class Optimal Distribution Adversarial Training
Jan 08, 2025Adversarial training has proven to be a highly effective method for improving the robustness of deep neural networks against adversarial attacks. Nonetheless, it has been observed to exhibit a limitation in terms of robust fairness, characterized by a significant disparity in robustness across different classes. Recent efforts to mitigate this problem have turned to class-wise reweighted methods. However, these methods suffer from a lack of rigorous theoretical analysis and are limited in their exploration of the weight space, as they mainly rely on existing heuristic algorithms or intuition to compute weights. In addition, these methods fail to guarantee the consistency of the optimization direction due to the decoupled optimization of weights and the model parameters. They potentially lead to suboptimal weight assignments and consequently, a suboptimal model. To address these problems, this paper proposes a novel min-max training framework, Class Optimal Distribution Adversarial Training (CODAT), which employs distributionally robust optimization to fully explore the class-wise weight space, thus enabling the identification of the optimal weight with theoretical guarantees. Furthermore, we derive a closed-form optimal solution to the internal maximization and then get a deterministic equivalent objective function, which provides a theoretical basis for the joint optimization of weights and model parameters. Meanwhile, we propose a fairness elasticity coefficient for the evaluation of the algorithm with regard to both robustness and robust fairness. Experimental results on various datasets show that the proposed method can effectively improve the robust fairness of the model and outperform the state-of-the-art approaches.
Interactive Trajectory Planner for Mandatory Lane Changing in Dense Non-Cooperative Traffic
Mar 04, 2023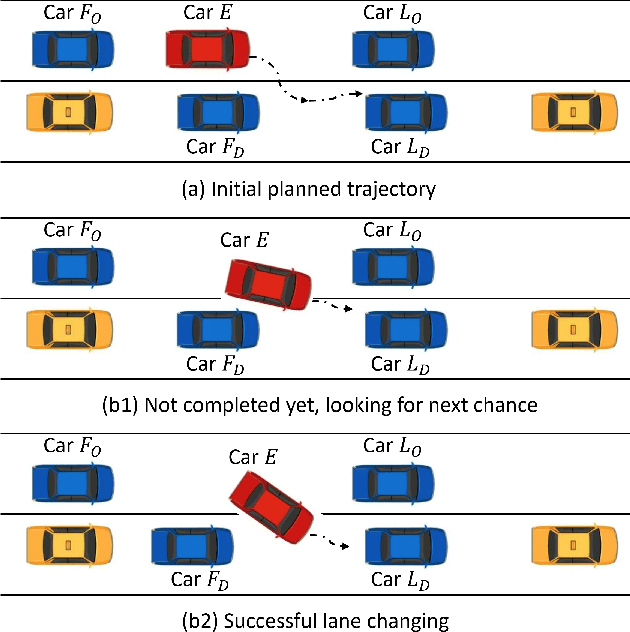
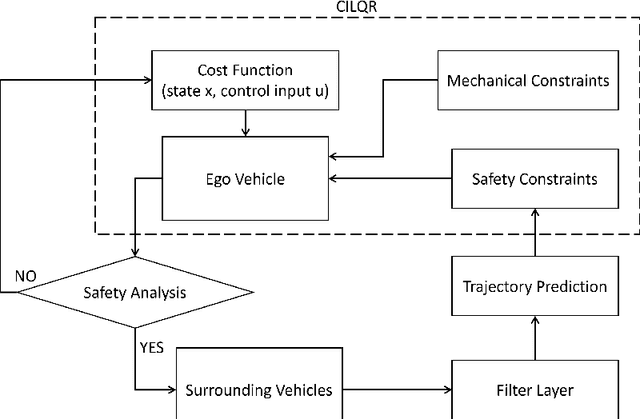
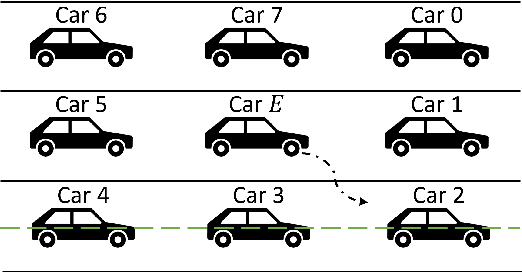
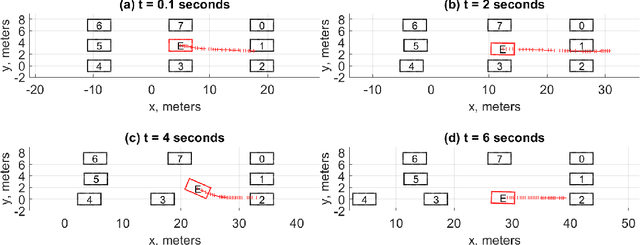
When the traffic stream is extremely congested and surrounding vehicles are not cooperative, the mandatory lane changing can be significantly difficult. In this work, we propose an interactive trajectory planner, which will firstly attempt to change lanes as long as safety is ensured. Based on receding horizon planning, the ego vehicle can abort or continue changing lanes according to surrounding vehicles' reactions. We demonstrate the performance of our planner in extensive simulations with eight surrounding vehicles, initial velocity ranging from 0.5 to 5 meters per second, and bumper to bumper gap ranging from 4 to 10 meters. The ego vehicle with our planner can change lanes safely and smoothly. The computation time of the planner at every step is within 10 milliseconds in most cases on a laptop with 1.8GHz Intel Core i7-10610U.
Unsupervised Seismic Footprint Removal With Physical Prior Augmented Deep Autoencoder
Feb 08, 2023Seismic acquisition footprints appear as stably faint and dim structures and emerge fully spatially coherent, causing inevitable damage to useful signals during the suppression process. Various footprint removal methods, including filtering and sparse representation (SR), have been reported to attain promising results for surmounting this challenge. However, these methods, e.g., SR, rely solely on the handcrafted image priors of useful signals, which is sometimes an unreasonable demand if complex geological structures are contained in the given seismic data. As an alternative, this article proposes a footprint removal network (dubbed FR-Net) for the unsupervised suppression of acquired footprints without any assumptions regarding valuable signals. The key to the FR-Net is to design a unidirectional total variation (UTV) model for footprint acquisition according to the intrinsically directional property of noise. By strongly regularizing a deep convolutional autoencoder (DCAE) using the UTV model, our FR-Net transforms the DCAE from an entirely data-driven model to a \textcolor{black}{prior-augmented} approach, inheriting the superiority of the DCAE and our footprint model. Subsequently, the complete separation of the footprint noise and useful signals is projected in an unsupervised manner, specifically by optimizing the FR-Net via the backpropagation (BP) algorithm. We provide qualitative and quantitative evaluations conducted on three synthetic and field datasets, demonstrating that our FR-Net surpasses the previous state-of-the-art (SOTA) methods.
Tele-Knowledge Pre-training for Fault Analysis
Oct 20, 2022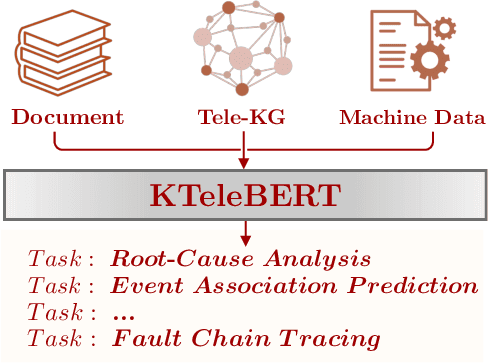
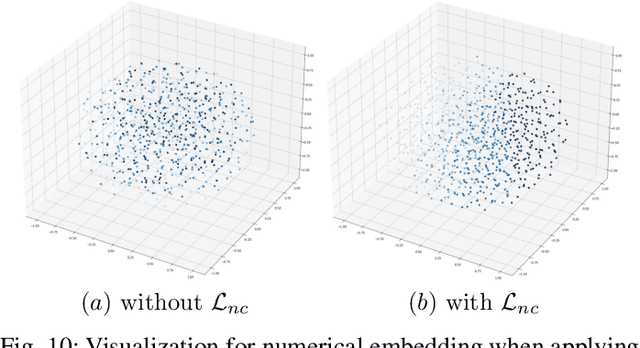


In this work, we share our experience on tele-knowledge pre-training for fault analysis. Fault analysis is a vital task for tele-application, which should be timely and properly handled. Fault analysis is also a complex task, that has many sub-tasks. Solving each task requires diverse tele-knowledge. Machine log data and product documents contain part of the tele-knowledge. We create a Tele-KG to organize other tele-knowledge from experts uniformly. With these valuable tele-knowledge data, in this work, we propose a tele-domain pre-training model KTeleBERT and its knowledge-enhanced version KTeleBERT, which includes effective prompt hints, adaptive numerical data encoding, and two knowledge injection paradigms. We train our model in two stages: pre-training TeleBERT on 20 million telecommunication corpora and re-training TeleBERT on 1 million causal and machine corpora to get the KTeleBERT. Then, we apply our models for three tasks of fault analysis, including root-cause analysis, event association prediction, and fault chain tracing. The results show that with KTeleBERT, the performance of task models has been boosted, demonstrating the effectiveness of pre-trained KTeleBERT as a model containing diverse tele-knowledge.
NeuralKG: An Open Source Library for Diverse Representation Learning of Knowledge Graphs
Feb 25, 2022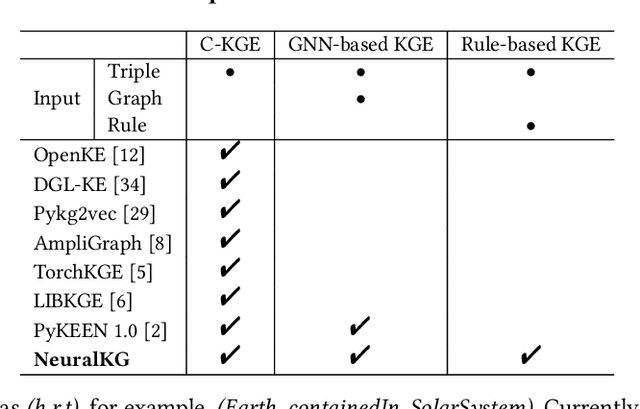
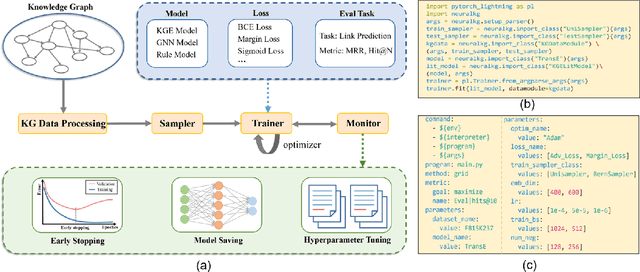
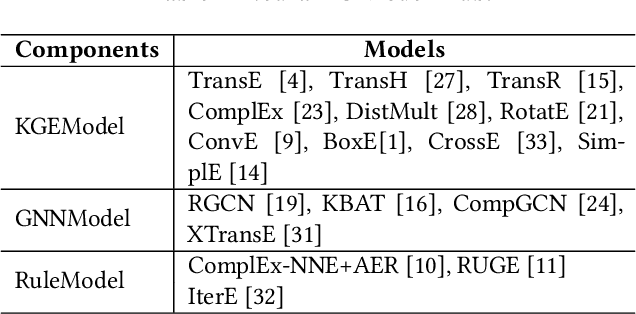
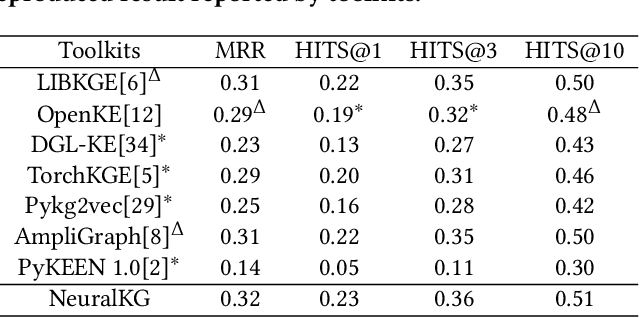
NeuralKG is an open-source Python-based library for diverse representation learning of knowledge graphs. It implements three different series of Knowledge Graph Embedding (KGE) methods, including conventional KGEs, GNN-based KGEs, and Rule-based KGEs. With a unified framework, NeuralKG successfully reproduces link prediction results of these methods on benchmarks, freeing users from the laborious task of reimplementing them, especially for some methods originally written in non-python programming languages. Besides, NeuralKG is highly configurable and extensible. It provides various decoupled modules that can be mixed and adapted to each other. Thus with NeuralKG, developers and researchers can quickly implement their own designed models and obtain the optimal training methods to achieve the best performance efficiently. We built an website in http://neuralkg.zjukg.cn to organize an open and shared KG representation learning community. The source code is all publicly released at https://github.com/zjukg/NeuralKG.
Learning Dynamic Compact Memory Embedding for Deformable Visual Object Tracking
Nov 23, 2021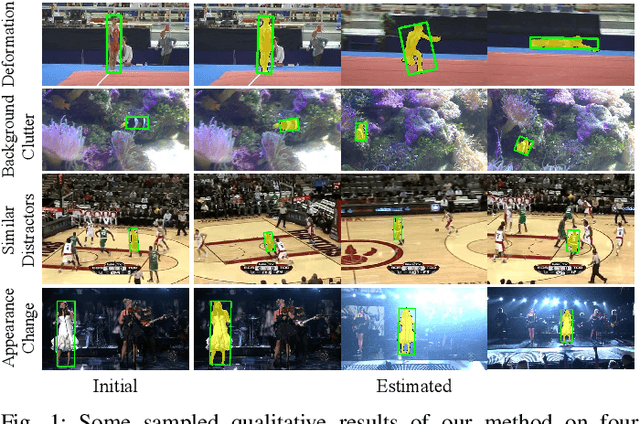
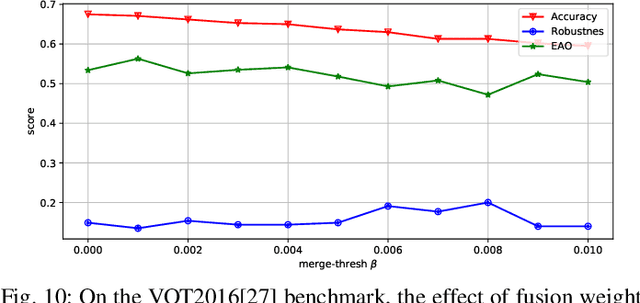
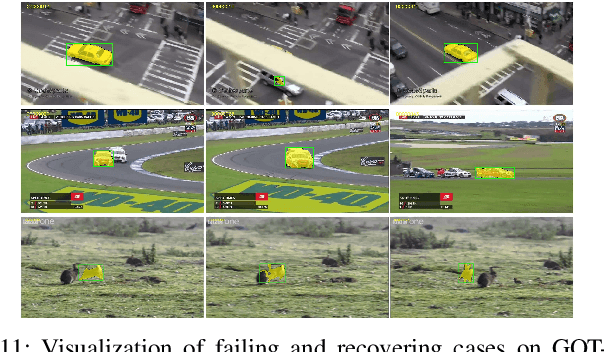
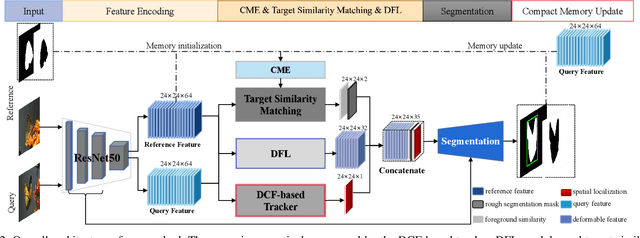
Recently, template-based trackers have become the leading tracking algorithms with promising performance in terms of efficiency and accuracy. However, the correlation operation between query feature and the given template only exploits accurate target localization, leading to state estimation error especially when the target suffers from severe deformable variations. To address this issue, segmentation-based trackers have been proposed that employ per-pixel matching to improve the tracking performance of deformable objects effectively. However, most of existing trackers only refer to the target features in the initial frame, thereby lacking the discriminative capacity to handle challenging factors, e.g., similar distractors, background clutter, appearance change, etc. To this end, we propose a dynamic compact memory embedding to enhance the discrimination of the segmentation-based deformable visual tracking method. Specifically, we initialize a memory embedding with the target features in the first frame. During the tracking process, the current target features that have high correlation with existing memory are updated to the memory embedding online. To further improve the segmentation accuracy for deformable objects, we employ a point-to-global matching strategy to measure the correlation between the pixel-wise query features and the whole template, so as to capture more detailed deformation information. Extensive evaluations on six challenging tracking benchmarks including VOT2016, VOT2018, VOT2019, GOT-10K, TrackingNet, and LaSOT demonstrate the superiority of our method over recent remarkable trackers. Besides, our method outperforms the excellent segmentation-based trackers, i.e., D3S and SiamMask on DAVIS2017 benchmark.