 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConnectivity Enhanced Safe Neural Network Planner for Lane Changing in Mixed Traffic
Feb 06, 2023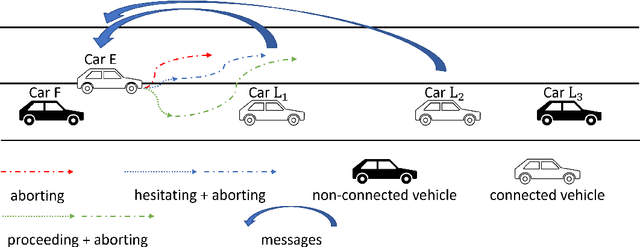
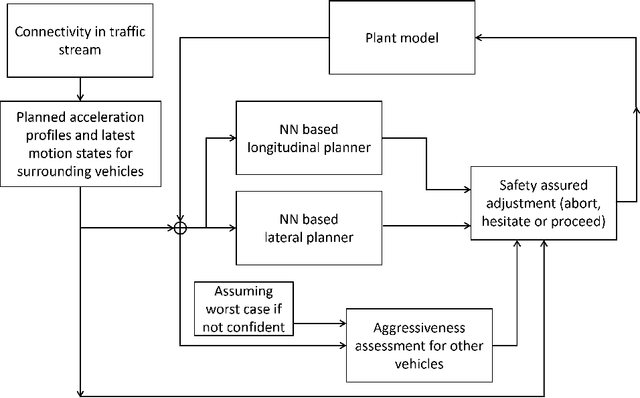
Connectivity technology has shown great potentials in improving the safety and efficiency of transportation systems by providing information beyond the perception and prediction capabilities of individual vehicles. However, it is expected that human-driven and autonomous vehicles, and connected and non-connected vehicles need to share the transportation network during the transition period to fully connected and automated transportation systems. Such mixed traffic scenarios significantly increase the complexity in analyzing system behavior and quantifying uncertainty for highly interactive scenarios, e.g., lane changing. It is even harder to ensure system safety when neural network based planners are leveraged to further improve efficiency. In this work, we propose a connectivity-enhanced neural network based lane changing planner. By cooperating with surrounding connected vehicles in dynamic environment, our proposed planner will adapt its planned trajectory according to the analysis of a safe evasion trajectory. We demonstrate the strength of our planner design in improving efficiency and ensuring safety in various mixed traffic scenarios with extensive simulations. We also analyze the system robustness when the communication or coordination is not perfect.
TAE: A Semi-supervised Controllable Behavior-aware Trajectory Generator and Predictor
Mar 02, 2022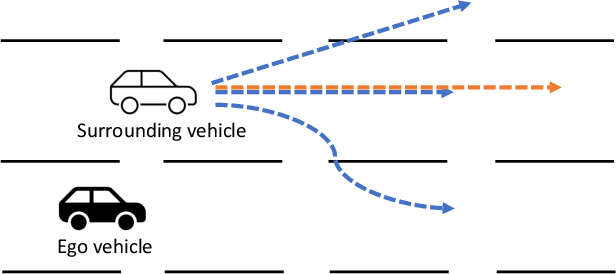
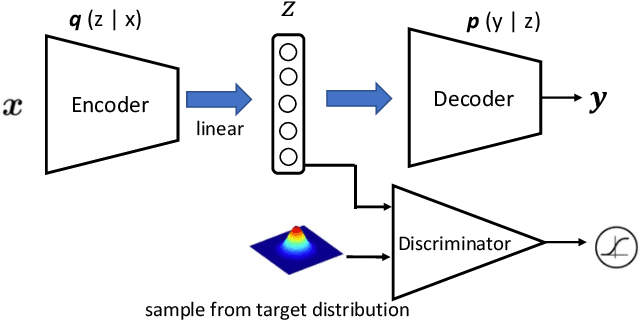
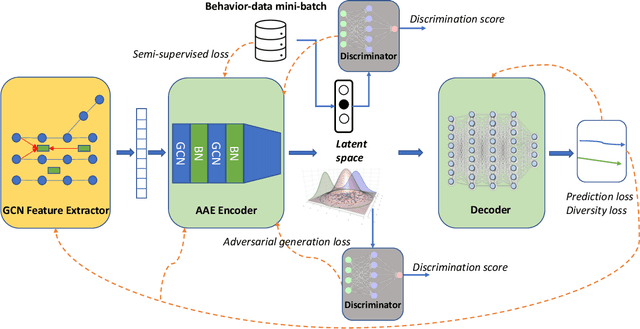
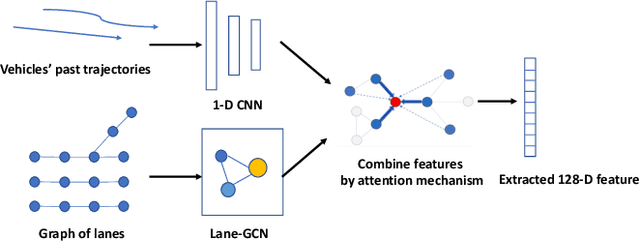
Trajectory generation and prediction are two interwoven tasks that play important roles in planner evaluation and decision making for intelligent vehicles. Most existing methods focus on one of the two and are optimized to directly output the final generated/predicted trajectories, which only contain limited information for critical scenario augmentation and safe planning. In this work, we propose a novel behavior-aware Trajectory Autoencoder (TAE) that explicitly models drivers' behavior such as aggressiveness and intention in the latent space, using semi-supervised adversarial autoencoder and domain knowledge in transportation. Our model addresses trajectory generation and prediction in a unified architecture and benefits both tasks: the model can generate diverse, controllable and realistic trajectories to enhance planner optimization in safety-critical and long-tailed scenarios, and it can provide prediction of critical behavior in addition to the final trajectories for decision making. Experimental results demonstrate that our method achieves promising performance on both trajectory generation and prediction.
Neural Network based Interactive Lane Changing Planner in Dense Traffic with Safety Guarantee
Jan 22, 2022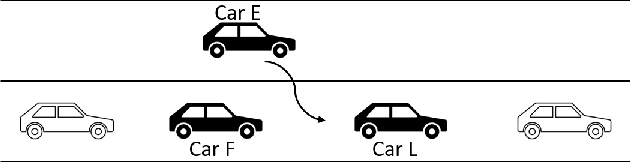

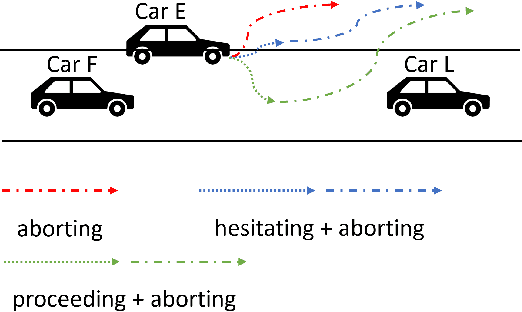
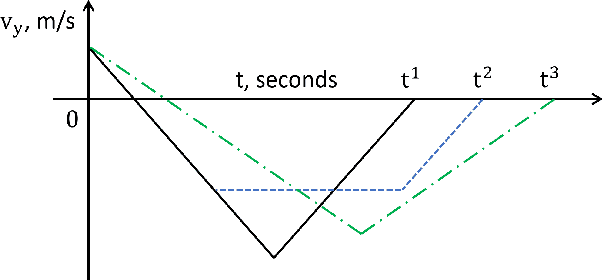
Neural network based planners have shown great promises in improving performance and task success rate in autonomous driving. However, it is very challenging to ensure safety of the system with learning enabled components, especially in dense and highly interactive traffic environments. In this work, we propose a neural network based lane changing planner framework that can ensure safety while sustaining system efficiency. To prevent too conservative planning, we assess the aggressiveness and identify the driving behavior of surrounding vehicles, then adapt the planned trajectory for the ego vehicle accordingly. The ego vehicle can proceed to change lanes if a safe evasion trajectory exists even in the worst case, otherwise, it can hesitate around current lateral position or return back to the original lane. We also quantitatively demonstrate the effectiveness of our planner design and its advantage over other baselines through extensive simulations with diverse and comprehensive experimental settings.