 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety-Assured Speculative Planning with Adaptive Prediction
Paper and Code
Jul 21, 2023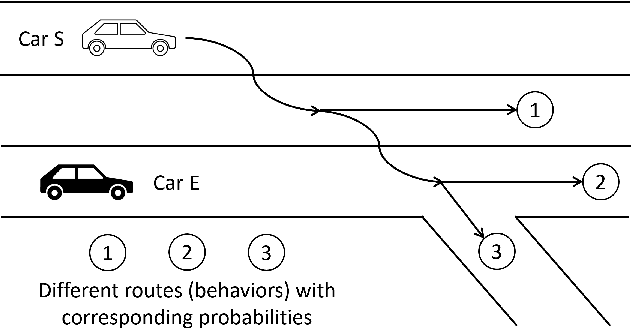
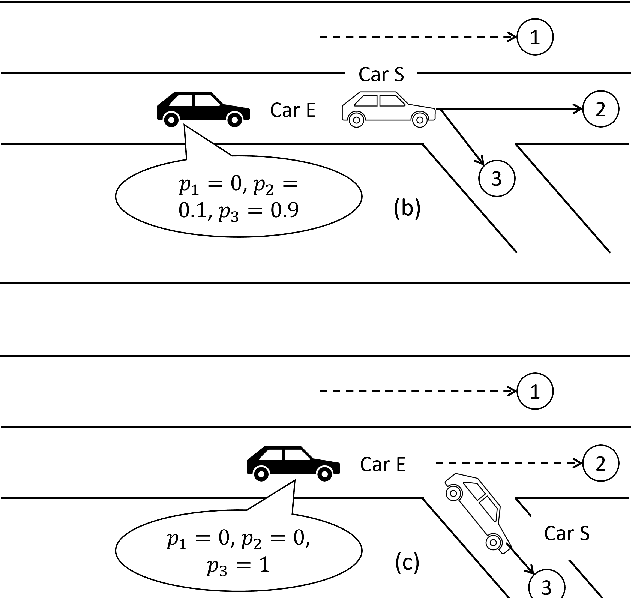
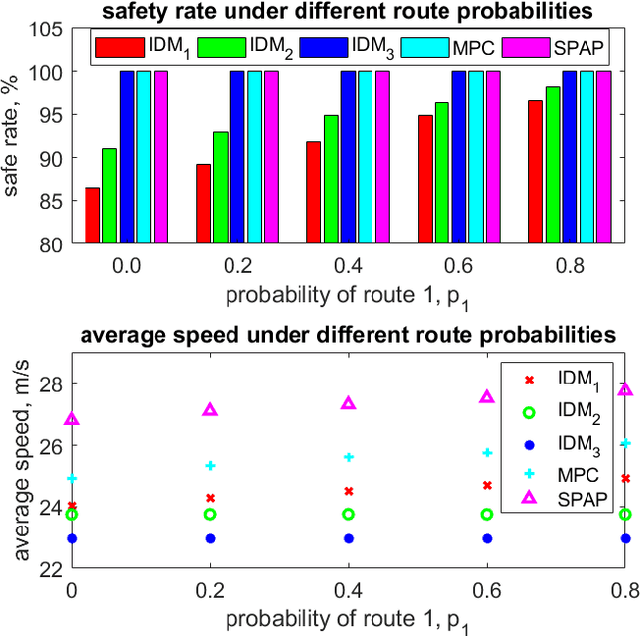
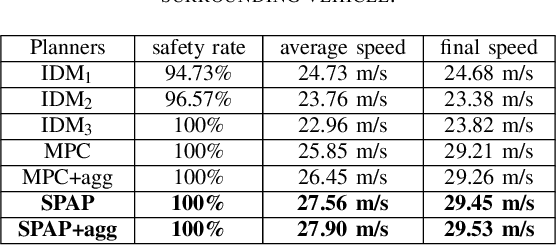
Recently significant progress has been made in vehicle prediction and planning algorithms for autonomous driving. However, it remains quite challenging for an autonomous vehicle to plan its trajectory in complex scenarios when it is difficult to accurately predict its surrounding vehicles' behaviors and trajectories. In this work, to maximize performance while ensuring safety, we propose a novel speculative planning framework based on a prediction-planning interface that quantifies both the behavior-level and trajectory-level uncertainties of surrounding vehicles. Our framework leverages recent prediction algorithms that can provide one or more possible behaviors and trajectories of the surrounding vehicles with probability estimation. It adapts those predictions based on the latest system states and traffic environment, and conducts planning to maximize the expected reward of the ego vehicle by considering the probabilistic predictions of all scenarios and ensure system safety by ruling out actions that may be unsafe in worst case. We demonstrate the effectiveness of our approach in improving system performance and ensuring system safety over other baseline methods, via extensive simulations in SUMO on a challenging multi-lane highway lane-changing case study.