 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Efficient Model-Based Approach on Learning Agile Motor Skills without Reinforcement
Mar 04, 2024
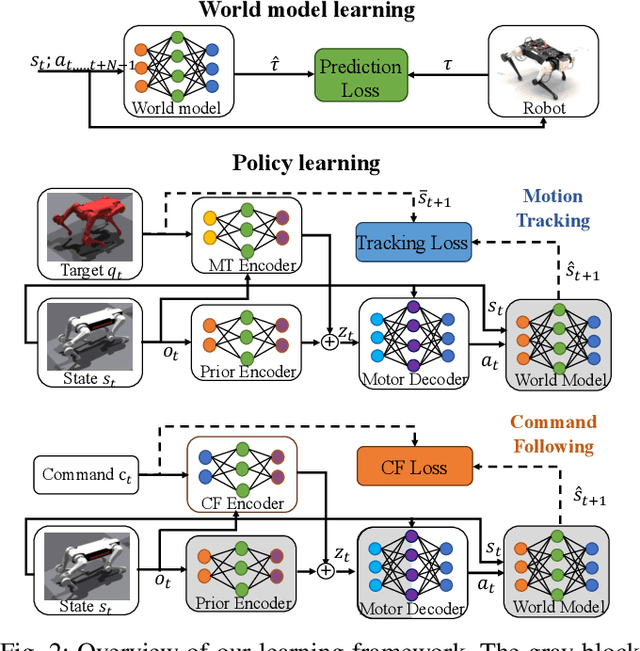
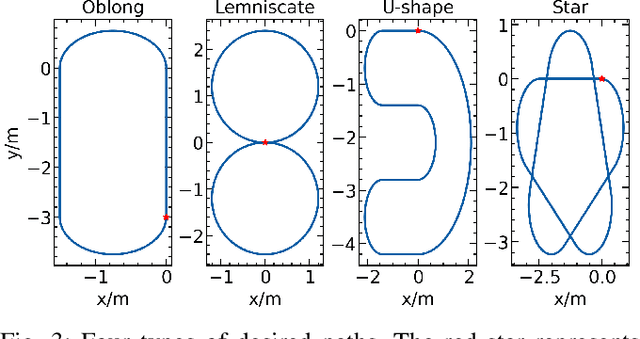
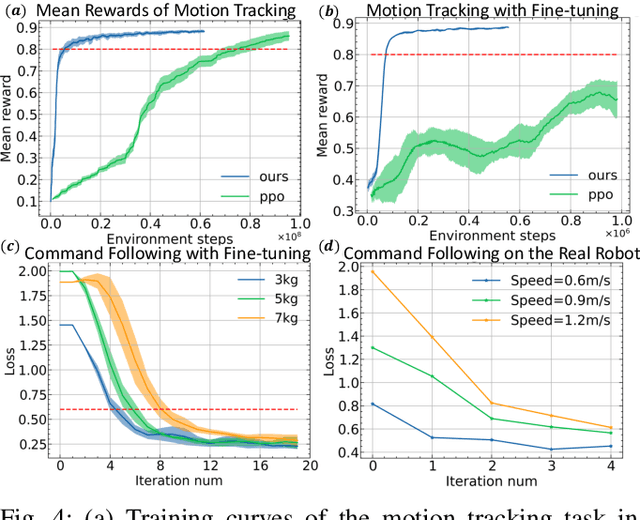
Learning-based methods have improved locomotion skills of quadruped robots through deep reinforcement learning. However, the sim-to-real gap and low sample efficiency still limit the skill transfer. To address this issue, we propose an efficient model-based learning framework that combines a world model with a policy network. We train a differentiable world model to predict future states and use it to directly supervise a Variational Autoencoder (VAE)-based policy network to imitate real animal behaviors. This significantly reduces the need for real interaction data and allows for rapid policy updates. We also develop a high-level network to track diverse commands and trajectories. Our simulated results show a tenfold sample efficiency increase compared to reinforcement learning methods such as PPO. In real-world testing, our policy achieves proficient command-following performance with only a two-minute data collection period and generalizes well to new speeds and paths.
Learning Highly Dynamic Behaviors for Quadrupedal Robots
Feb 21, 2024Learning highly dynamic behaviors for robots has been a longstanding challenge. Traditional approaches have demonstrated robust locomotion, but the exhibited behaviors lack diversity and agility. They employ approximate models, which lead to compromises in performance. Data-driven approaches have been shown to reproduce agile behaviors of animals, but typically have not been able to learn highly dynamic behaviors. In this paper, we propose a learning-based approach to enable robots to learn highly dynamic behaviors from animal motion data. The learned controller is deployed on a quadrupedal robot and the results show that the controller is able to reproduce highly dynamic behaviors including sprinting, jumping and sharp turning. Various behaviors can be activated through human interaction using a stick with markers attached to it. Based on the motion pattern of the stick, the robot exhibits walking, running, sitting and jumping, much like the way humans interact with a pet.
Lifelike Agility and Play on Quadrupedal Robots using Reinforcement Learning and Generative Pre-trained Models
Aug 29, 2023Summarizing knowledge from animals and human beings inspires robotic innovations. In this work, we propose a framework for driving legged robots act like real animals with lifelike agility and strategy in complex environments. Inspired by large pre-trained models witnessed with impressive performance in language and image understanding, we introduce the power of advanced deep generative models to produce motor control signals stimulating legged robots to act like real animals. Unlike conventional controllers and end-to-end RL methods that are task-specific, we propose to pre-train generative models over animal motion datasets to preserve expressive knowledge of animal behavior. The pre-trained model holds sufficient primitive-level knowledge yet is environment-agnostic. It is then reused for a successive stage of learning to align with the environments by traversing a number of challenging obstacles that are rarely considered in previous approaches, including creeping through narrow spaces, jumping over hurdles, freerunning over scattered blocks, etc. Finally, a task-specific controller is trained to solve complex downstream tasks by reusing the knowledge from previous stages. Enriching the knowledge regarding each stage does not affect the usage of other levels of knowledge. This flexible framework offers the possibility of continual knowledge accumulation at different levels. We successfully apply the trained multi-level controllers to the MAX robot, a quadrupedal robot developed in-house, to mimic animals, traverse complex obstacles, and play in a designed challenging multi-agent Chase Tag Game, where lifelike agility and strategy emerge on the robots. The present research pushes the frontier of robot control with new insights on reusing multi-level pre-trained knowledge and solving highly complex downstream tasks in the real world.