 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhole-Body Impedance Coordinative Control of Wheel-Legged Robot on Uncertain Terrain
Nov 15, 2024



This article propose a whole-body impedance coordinative control framework for a wheel-legged humanoid robot to achieve adaptability on complex terrains while maintaining robot upper body stability. The framework contains a bi-level control strategy. The outer level is a variable damping impedance controller, which optimizes the damping parameters to ensure the stability of the upper body while holding an object. The inner level employs Whole-Body Control (WBC) optimization that integrates real-time terrain estimation based on wheel-foot position and force data. It generates motor torques while accounting for dynamic constraints, joint limits,friction cones, real-time terrain updates, and a model-free friction compensation strategy. The proposed whole-body coordinative control method has been tested on a recently developed quadruped humanoid robot. The results demonstrate that the proposed algorithm effectively controls the robot, maintaining upper body stability to successfully complete a water-carrying task while adapting to varying terrains.
Explainable Hierarchical Imitation Learning for Robotic Drink Pouring
May 16, 2021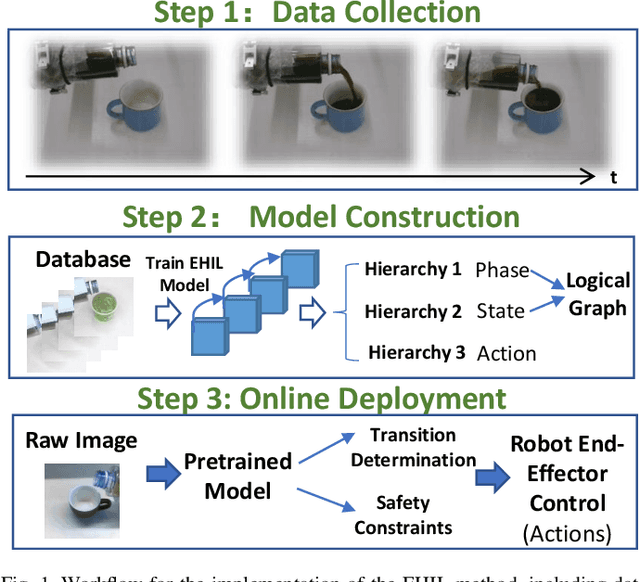
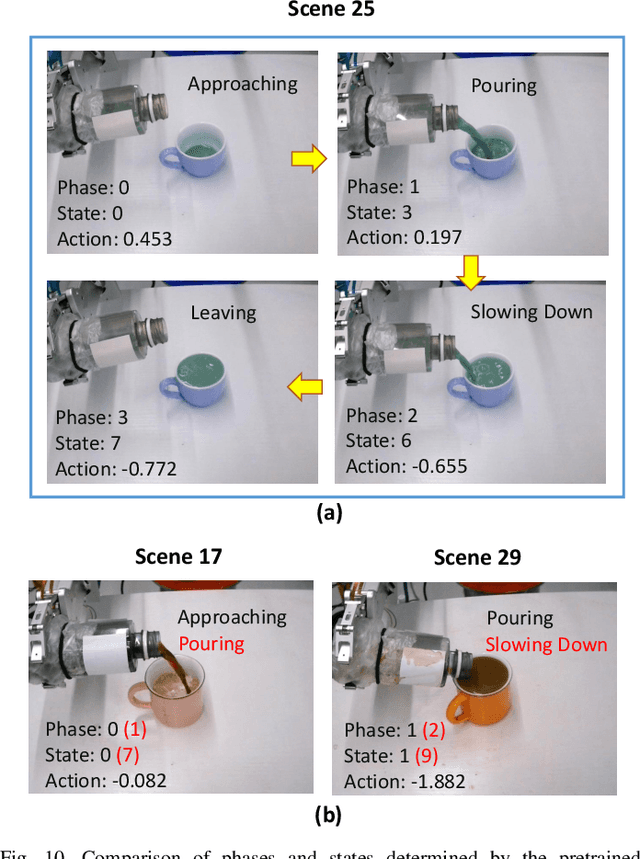
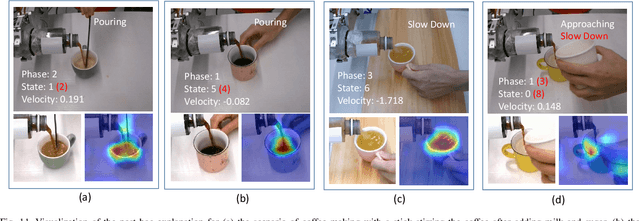
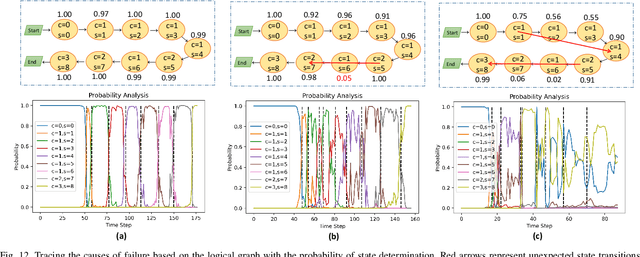
To accurately pour drinks into various containers is an essential skill for service robots. However, drink pouring is a dynamic process and difficult to model. Traditional deep imitation learning techniques for implementing autonomous robotic pouring have an inherent black-box effect and require a large amount of demonstration data for model training. To address these issues, an Explainable Hierarchical Imitation Learning (EHIL) method is proposed in this paper such that a robot can learn high-level general knowledge and execute low-level actions across multiple drink pouring scenarios. Moreover, with EHIL, a logical graph can be constructed for task execution, through which the decision-making process for action generation can be made explainable to users and the causes of failure can be traced out. Based on the logical graph, the framework is manipulable to achieve different targets while the adaptability to unseen scenarios can be achieved in an explainable manner. A series of experiments have been conducted to verify the effectiveness of the proposed method. Results indicate that EHIL outperforms the traditional behavior cloning method in terms of success rate, adaptability, manipulability and explainability.