 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-Aware and Temporally Regulated Expert Advice in Reinforcement Learning for Autonomous Driving
May 28, 2026Exploration in reinforcement learning for autonomous driving is inherently unsafe: agents must experience novel behaviors to learn, yet exploration can lead to collisions or off-road driving. We propose an uncertainty-aware framework that leverages expert advice to guide exploration while avoiding long-term dependence. Advice is triggered when epistemic or aleatoric uncertainty exceeds adaptive thresholds derived from rolling buffers, ensuring advice evolves with the agent's confidence. A commitment-cooldown strategy with a stochastic early-stop heuristic regulates the duration and frequency of guidance, exposing the agent to coherent maneuvers without exhausting the advice budget. Expert and agent experiences are combined in a shared replay buffer within an off-policy implicit quantile network (IQN) backbone, enabling efficient reuse of expert trajectories. Experiments in CARLA show that our method outperforms the IQN baseline, improving success by 5-7% and reducing failures, demonstrating that risk-sensitive uncertainty coupled with regulated expert integration enables safer and more efficient exploration for sensor-based RL policy learning in unsignalized intersection navigation.
Automatic Curriculum Learning for Driving Scenarios: Towards Robust and Efficient Reinforcement Learning
May 13, 2025This paper addresses the challenges of training end-to-end autonomous driving agents using Reinforcement Learning (RL). RL agents are typically trained in a fixed set of scenarios and nominal behavior of surrounding road users in simulations, limiting their generalization and real-life deployment. While domain randomization offers a potential solution by randomly sampling driving scenarios, it frequently results in inefficient training and sub-optimal policies due to the high variance among training scenarios. To address these limitations, we propose an automatic curriculum learning framework that dynamically generates driving scenarios with adaptive complexity based on the agent's evolving capabilities. Unlike manually designed curricula that introduce expert bias and lack scalability, our framework incorporates a ``teacher'' that automatically generates and mutates driving scenarios based on their learning potential -- an agent-centric metric derived from the agent's current policy -- eliminating the need for expert design. The framework enhances training efficiency by excluding scenarios the agent has mastered or finds too challenging. We evaluate our framework in a reinforcement learning setting where the agent learns a driving policy from camera images. Comparative results against baseline methods, including fixed scenario training and domain randomization, demonstrate that our approach leads to enhanced generalization, achieving higher success rates: +9\% in low traffic density, +21\% in high traffic density, and faster convergence with fewer training steps. Our findings highlight the potential of ACL in improving the robustness and efficiency of RL-based autonomous driving agents.
Balancing Progress and Safety: A Novel Risk-Aware Objective for RL in Autonomous Driving
May 10, 2025Reinforcement Learning (RL) is a promising approach for achieving autonomous driving due to robust decision-making capabilities. RL learns a driving policy through trial and error in traffic scenarios, guided by a reward function that combines the driving objectives. The design of such reward function has received insufficient attention, yielding ill-defined rewards with various pitfalls. Safety, in particular, has long been regarded only as a penalty for collisions. This leaves the risks associated with actions leading up to a collision unaddressed, limiting the applicability of RL in real-world scenarios. To address these shortcomings, our work focuses on enhancing the reward formulation by defining a set of driving objectives and structuring them hierarchically. Furthermore, we discuss the formulation of these objectives in a normalized manner to transparently determine their contribution to the overall reward. Additionally, we introduce a novel risk-aware objective for various driving interactions based on a two-dimensional ellipsoid function and an extension of Responsibility-Sensitive Safety (RSS) concepts. We evaluate the efficacy of our proposed reward in unsignalized intersection scenarios with varying traffic densities. The approach decreases collision rates by 21\% on average compared to baseline rewards and consistently surpasses them in route progress and cumulative reward, demonstrating its capability to promote safer driving behaviors while maintaining high-performance levels.
A Chefs KISS -- Utilizing semantic information in both ICP and SLAM framework
Apr 02, 2025



For utilizing autonomous vehicle in urban areas a reliable localization is needed. Especially when HD maps are used, a precise and repeatable method has to be chosen. Therefore accurate map generation but also re-localization against these maps is necessary. Due to best 3D reconstruction of the surrounding, LiDAR has become a reliable modality for localization. The latest LiDAR odometry estimation are based on iterative closest point (ICP) approaches, namely KISS-ICP and SAGE-ICP. We extend the capabilities of KISS-ICP by incorporating semantic information into the point alignment process using a generalizable approach with minimal parameter tuning. This enhancement allows us to surpass KISS-ICP in terms of absolute trajectory error (ATE), the primary metric for map accuracy. Additionally, we improve the Cartographer mapping framework to handle semantic information. Cartographer facilitates loop closure detection over larger areas, mitigating odometry drift and further enhancing ATE accuracy. By integrating semantic information into the mapping process, we enable the filtering of specific classes, such as parked vehicles, from the resulting map. This filtering improves relocalization quality by addressing temporal changes, such as vehicles being moved.
CoCar NextGen: a Multi-Purpose Platform for Connected Autonomous Driving Research
Apr 26, 2024
Real world testing is of vital importance to the success of automated driving. While many players in the business design purpose build testing vehicles, we designed and build a modular platform that offers high flexibility for any kind of scenario. CoCar NextGen is equipped with next generation hardware that addresses all future use cases. Its extensive, redundant sensor setup allows to develop cross-domain data driven approaches that manage the transfer to other sensor setups. Together with the possibility of being deployed on public roads, this creates a unique research platform that supports the road to automated driving on SAE Level 5.
Leveraging Swarm Intelligence to Drive Autonomously: A Particle Swarm Optimization based Approach to Motion Planning
Apr 03, 2024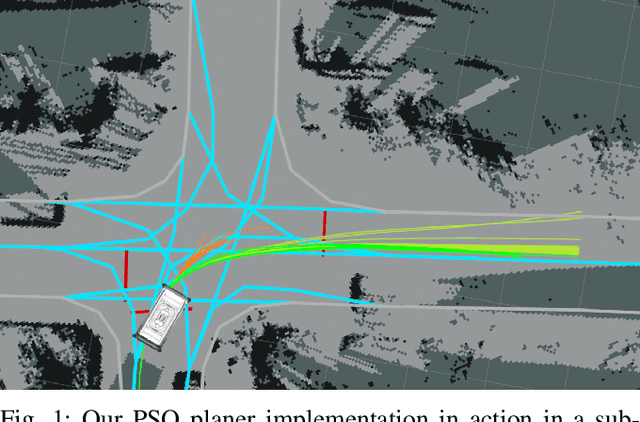
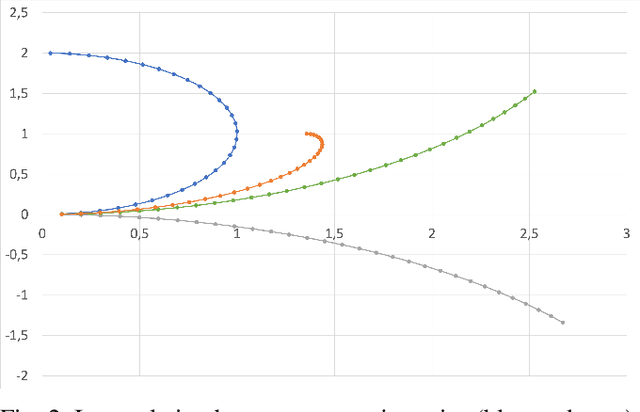
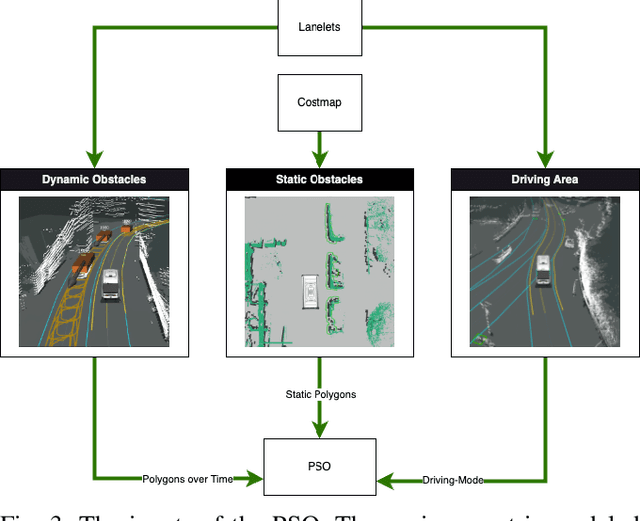
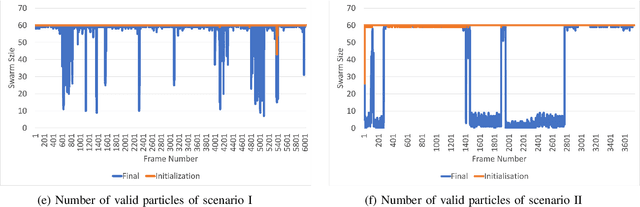
Motion planning is an essential part of autonomous mobile platforms. A good pipeline should be modular enough to handle different vehicles, environments, and perception modules. The planning process has to cope with all the different modalities and has to have a modular and flexible design. But most importantly, it has to be safe and robust. In this paper, we want to present our motion planning pipeline with particle swarm optimization (PSO) at its core. This solution is independent of the vehicle type and has a clear and simple-to-implement interface for perception modules. Moreover, the approach stands out for being easily adaptable to new scenarios. Parallel calculation allows for fast planning cycles. Following the principles of PSO, the trajectory planer first generates a swarm of initial trajectories that are optimized afterward. We present the underlying control space and inner workings. Finally, the application to real-world automated driving is shown in the evaluation with a deeper look at the modeling of the cost function. The approach is used in our automated shuttles that have already driven more than 3.500 km safely and entirely autonomously in sub-urban everyday traffic.
One Stack to Rule them All: To Drive Automated Vehicles, and Reach for the 4th level
Apr 03, 2024



Most automated driving functions are designed for a specific task or vehicle. Most often, the underlying architecture is fixed to specific algorithms to increase performance. Therefore, it is not possible to deploy new modules and algorithms easily. In this paper, we present our automated driving stack which combines both scalability and adaptability. Due to the modular design, our stack allows for a fast integration and testing of novel and state-of-the-art research approaches. Furthermore, it is flexible to be used for our different testing vehicles, including modified EasyMile EZ10 shuttles and different passenger cars. These vehicles differ in multiple ways, e.g. sensor setups, control systems, maximum speed, or steering angle limitations. Finally, our stack is deployed in real world environments, including passenger transport in urban areas. Our stack includes all components needed for operating an autonomous vehicle, including localization, perception, planning, controller, and additional safety modules. Our stack is developed, tested, and evaluated in real world traffic in multiple test sites, including the Test Area Autonomous Driving Baden-W\"urttemberg.
KI-PMF: Knowledge Integrated Plausible Motion Forecasting
Oct 18, 2023Accurately forecasting the motion of traffic actors is crucial for the deployment of autonomous vehicles at a large scale. Current trajectory forecasting approaches primarily concentrate on optimizing a loss function with a specific metric, which can result in predictions that do not adhere to physical laws or violate external constraints. Our objective is to incorporate explicit knowledge priors that allow a network to forecast future trajectories in compliance with both the kinematic constraints of a vehicle and the geometry of the driving environment. To achieve this, we introduce a non-parametric pruning layer and attention layers to integrate the defined knowledge priors. Our proposed method is designed to ensure reachability guarantees for traffic actors in both complex and dynamic situations. By conditioning the network to follow physical laws, we can obtain accurate and safe predictions, essential for maintaining autonomous vehicles' safety and efficiency in real-world settings.In summary, this paper presents concepts that prevent off-road predictions for safe and reliable motion forecasting by incorporating knowledge priors into the training process.
Holistic Graph-based Motion Prediction
Jan 31, 2023



Motion prediction for automated vehicles in complex environments is a difficult task that is to be mastered when automated vehicles are to be used in arbitrary situations. Many factors influence the future motion of traffic participants starting with traffic rules and reaching from the interaction between each other to personal habits of human drivers. Therefore we present a novel approach for a graph-based prediction based on a heterogeneous holistic graph representation that combines temporal information, properties and relations between traffic participants as well as relations with static elements like the road network. The information are encoded through different types of nodes and edges that both are enriched with arbitrary features. We evaluated the approach on the INTERACTION and the Argoverse dataset and conducted an informative ablation study to demonstrate the benefit of different types of information for the motion prediction quality.
Generalizing Decision Making for Automated Driving with an Invariant Environment Representation using Deep Reinforcement Learning
Feb 12, 2021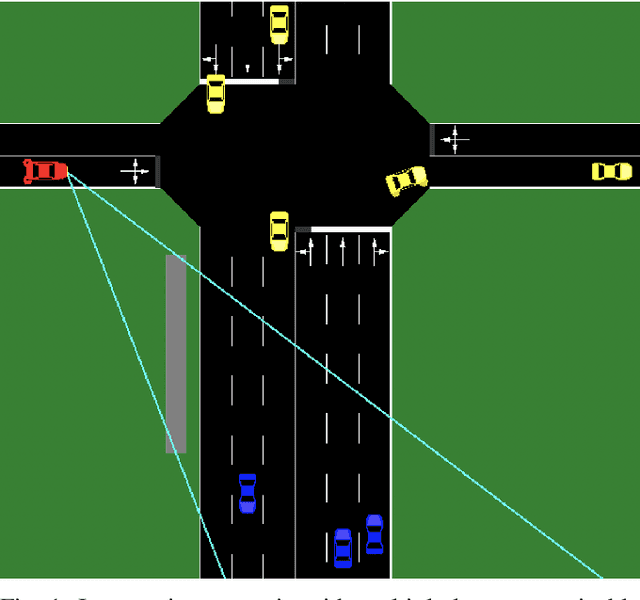
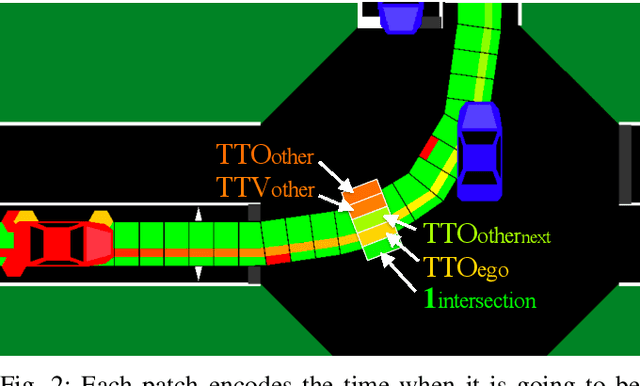
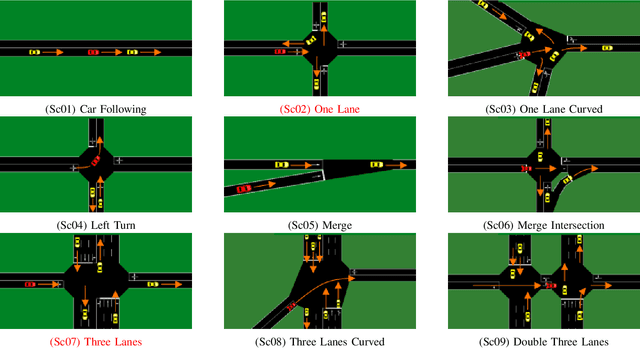
Data driven approaches for decision making applied to automated driving require appropriate generalization strategies, to ensure applicability to the world's variability. Current approaches either do not generalize well beyond the training data or are not capable to consider a variable number of traffic participants. Therefore we propose an invariant environment representation from the perspective of the ego vehicle. The representation encodes all necessary information for safe decision making. To assess the generalization capabilities of the novel environment representation, we train our agents on a small subset of scenarios and evaluate on the entire set. Here we show that the agents are capable to generalize successfully to unseen scenarios, due to the abstraction. In addition we present a simple occlusion model that enables our agents to navigate intersections with occlusions without a significant change in performance.