 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneralizing Decision Making for Automated Driving with an Invariant Environment Representation using Deep Reinforcement Learning
Feb 12, 2021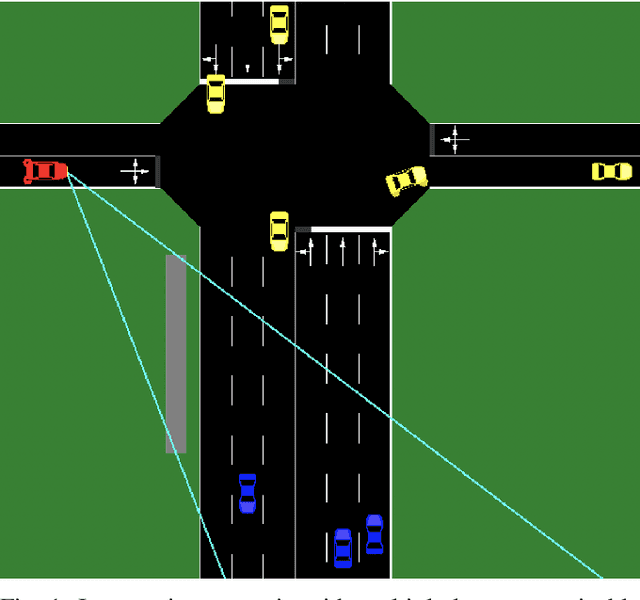
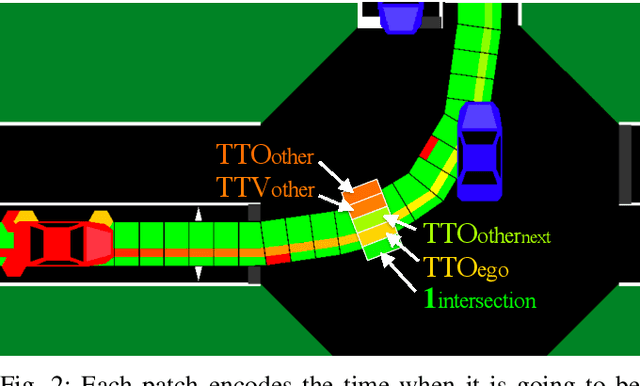
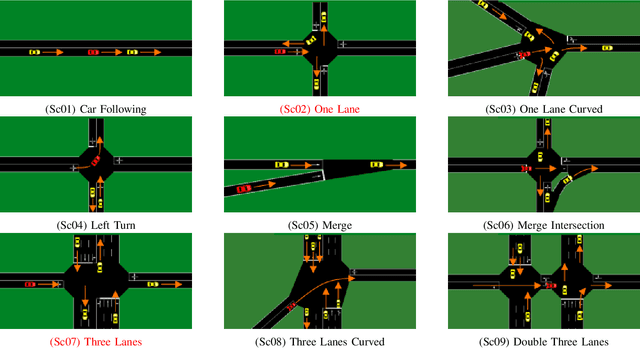
Data driven approaches for decision making applied to automated driving require appropriate generalization strategies, to ensure applicability to the world's variability. Current approaches either do not generalize well beyond the training data or are not capable to consider a variable number of traffic participants. Therefore we propose an invariant environment representation from the perspective of the ego vehicle. The representation encodes all necessary information for safe decision making. To assess the generalization capabilities of the novel environment representation, we train our agents on a small subset of scenarios and evaluate on the entire set. Here we show that the agents are capable to generalize successfully to unseen scenarios, due to the abstraction. In addition we present a simple occlusion model that enables our agents to navigate intersections with occlusions without a significant change in performance.