 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigiT4TAF -- Bridging Physical and Digital Worlds for Future Transportation Systems
Jul 03, 2025In the future, mobility will be strongly shaped by the increasing use of digitalization. Not only will individual road users be highly interconnected, but also the road and associated infrastructure. At that point, a Digital Twin becomes particularly appealing because, unlike a basic simulation, it offers a continuous, bilateral connection linking the real and virtual environments. This paper describes the digital reconstruction used to develop the Digital Twin of the Test Area Autonomous Driving-Baden-W\"urttemberg (TAF-BW), Germany. The TAF-BW offers a variety of different road sections, from high-traffic urban intersections and tunnels to multilane motorways. The test area is equipped with a comprehensive Vehicle-to-Everything (V2X) communication infrastructure and multiple intelligent intersections equipped with camera sensors to facilitate real-time traffic flow monitoring. The generation of authentic data as input for the Digital Twin was achieved by extracting object lists at the intersections. This process was facilitated by the combined utilization of camera images from the intelligent infrastructure and LiDAR sensors mounted on a test vehicle. Using a unified interface, recordings from real-world detections of traffic participants can be resimulated. Additionally, the simulation framework's design and the reconstruction process is discussed. The resulting framework is made publicly available for download and utilization at: https://digit4taf-bw.fzi.de The demonstration uses two case studies to illustrate the application of the digital twin and its interfaces: the analysis of traffic signal systems to optimize traffic flow and the simulation of security-related scenarios in the communications sector.
Empowering Autonomous Shuttles with Next-Generation Infrastructure
Oct 28, 2024As cities strive to address urban mobility challenges, combining autonomous transportation technologies with intelligent infrastructure presents an opportunity to transform how people move within urban environments. Autonomous shuttles are particularly suited for adaptive and responsive public transport for the first and last mile, connecting with smart infrastructure to enhance urban transit. This paper presents the concept, implementation, and evaluation of a proof-of-concept deployment of an autonomous shuttle integrated with smart infrastructure at a public fair. The infrastructure includes two perception-equipped bus stops and a connected pedestrian intersection, all linked through a central communication and control hub. Our key contributions include the development of a comprehensive system architecture for "smart" bus stops, the integration of multiple urban locations into a cohesive smart transport ecosystem, and the creation of adaptive shuttle behavior for automated driving. Additionally, we publish an open source dataset and a Vehicle-to-X (V2X) driver to support further research. Finally, we offer an outlook on future research directions and potential expansions of the demonstrated technologies and concepts.
CoCar NextGen: a Multi-Purpose Platform for Connected Autonomous Driving Research
Apr 26, 2024
Real world testing is of vital importance to the success of automated driving. While many players in the business design purpose build testing vehicles, we designed and build a modular platform that offers high flexibility for any kind of scenario. CoCar NextGen is equipped with next generation hardware that addresses all future use cases. Its extensive, redundant sensor setup allows to develop cross-domain data driven approaches that manage the transfer to other sensor setups. Together with the possibility of being deployed on public roads, this creates a unique research platform that supports the road to automated driving on SAE Level 5.
Scene-Extrapolation: Generating Interactive Traffic Scenarios
Apr 26, 2024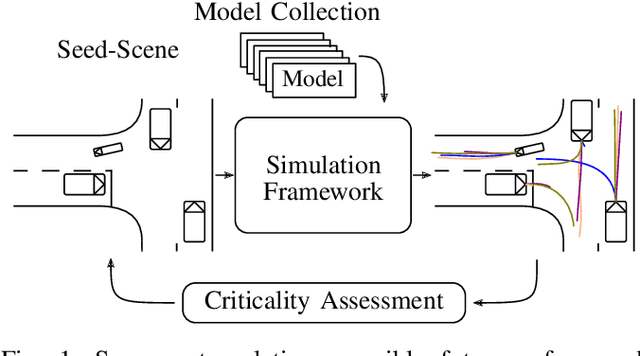
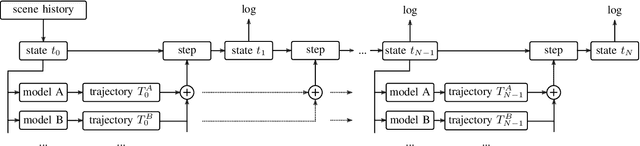
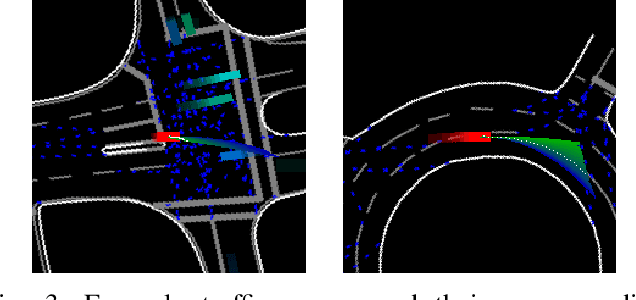
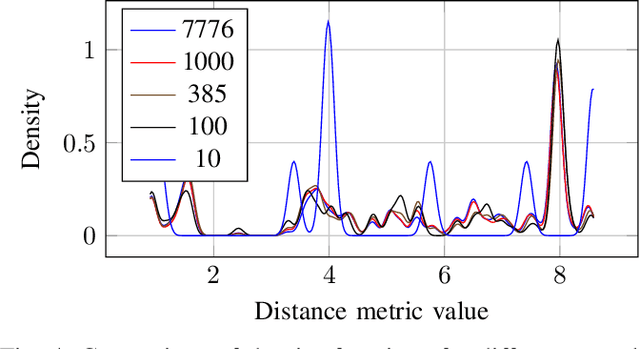
Verifying highly automated driving functions can be challenging, requiring identifying relevant test scenarios. Scenario-based testing will likely play a significant role in verifying these systems, predominantly occurring within simulation. In our approach, we use traffic scenes as a starting point (seed-scene) to address the individuality of various highly automated driving functions and to avoid the problems associated with a predefined test traffic scenario. Different highly autonomous driving functions, or their distinct iterations, may display different behaviors under the same operating conditions. To make a generalizable statement about a seed-scene, we simulate possible outcomes based on various behavior profiles. We utilize our lightweight simulation environment and populate it with rule-based and machine learning behavior models for individual actors in the scenario. We analyze resulting scenarios using a variety of criticality metrics. The density distributions of the resulting criticality values enable us to make a profound statement about the significance of a particular scene, considering various eventualities.
One Stack to Rule them All: To Drive Automated Vehicles, and Reach for the 4th level
Apr 03, 2024



Most automated driving functions are designed for a specific task or vehicle. Most often, the underlying architecture is fixed to specific algorithms to increase performance. Therefore, it is not possible to deploy new modules and algorithms easily. In this paper, we present our automated driving stack which combines both scalability and adaptability. Due to the modular design, our stack allows for a fast integration and testing of novel and state-of-the-art research approaches. Furthermore, it is flexible to be used for our different testing vehicles, including modified EasyMile EZ10 shuttles and different passenger cars. These vehicles differ in multiple ways, e.g. sensor setups, control systems, maximum speed, or steering angle limitations. Finally, our stack is deployed in real world environments, including passenger transport in urban areas. Our stack includes all components needed for operating an autonomous vehicle, including localization, perception, planning, controller, and additional safety modules. Our stack is developed, tested, and evaluated in real world traffic in multiple test sites, including the Test Area Autonomous Driving Baden-W\"urttemberg.
Heterogeneous Graph-based Trajectory Prediction using Local Map Context and Social Interactions
Nov 30, 2023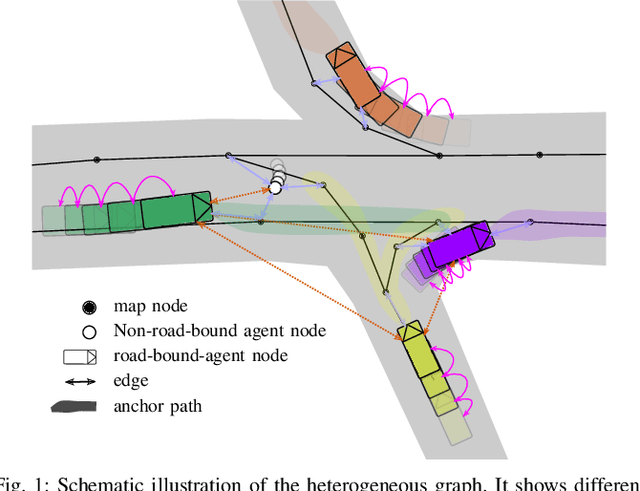
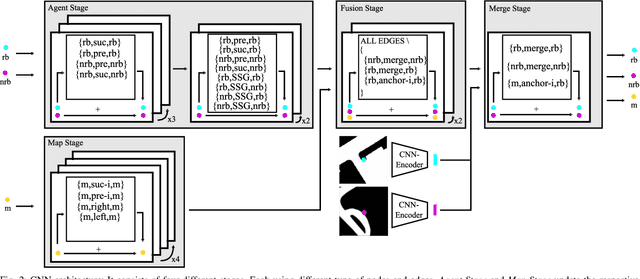
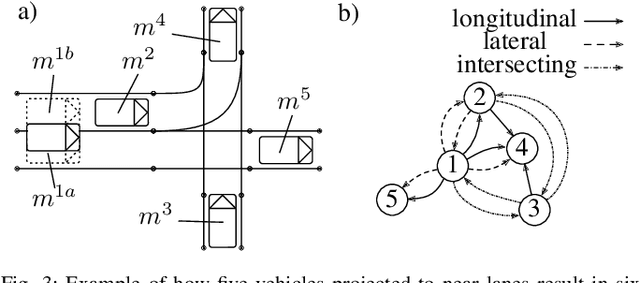
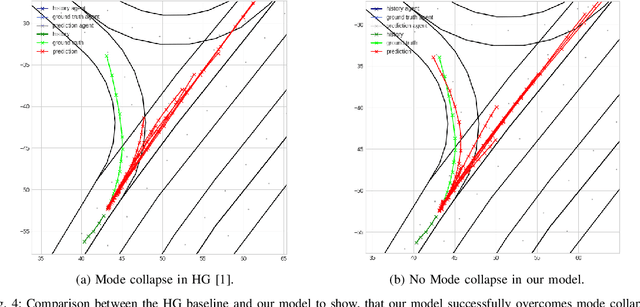
Precisely predicting the future trajectories of surrounding traffic participants is a crucial but challenging problem in autonomous driving, due to complex interactions between traffic agents, map context and traffic rules. Vector-based approaches have recently shown to achieve among the best performances on trajectory prediction benchmarks. These methods model simple interactions between traffic agents but don't distinguish between relation-type and attributes like their distance along the road. Furthermore, they represent lanes only by sequences of vectors representing center lines and ignore context information like lane dividers and other road elements. We present a novel approach for vector-based trajectory prediction that addresses these shortcomings by leveraging three crucial sources of information: First, we model interactions between traffic agents by a semantic scene graph, that accounts for the nature and important features of their relation. Second, we extract agent-centric image-based map features to model the local map context. Finally, we generate anchor paths to enforce the policy in multi-modal prediction to permitted trajectories only. Each of these three enhancements shows advantages over the baseline model HoliGraph.
Traffic Scene Similarity: a Graph-based Contrastive Learning Approach
Sep 18, 2023Ensuring validation for highly automated driving poses significant obstacles to the widespread adoption of highly automated vehicles. Scenario-based testing offers a potential solution by reducing the homologation effort required for these systems. However, a crucial prerequisite, yet unresolved, is the definition and reduction of the test space to a finite number of scenarios. To tackle this challenge, we propose an extension to a contrastive learning approach utilizing graphs to construct a meaningful embedding space. Our approach demonstrates the continuous mapping of scenes using scene-specific features and the formation of thematically similar clusters based on the resulting embeddings. Based on the found clusters, similar scenes could be identified in the subsequent test process, which can lead to a reduction in redundant test runs.
Utilizing Hybrid Trajectory Prediction Models to Recognize Highly Interactive Traffic Scenarios
Sep 13, 2023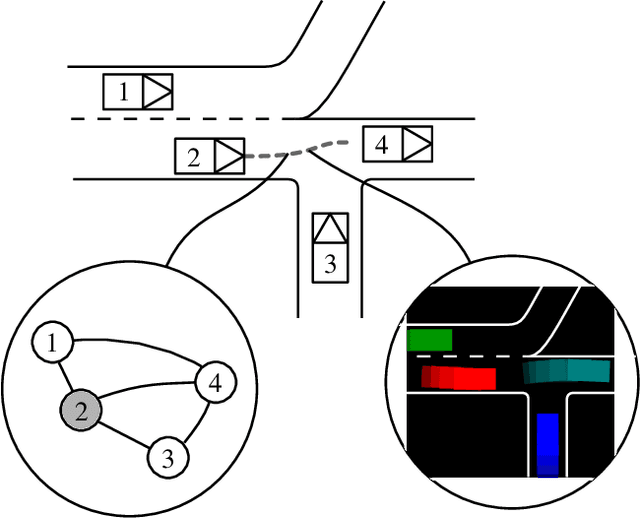



Autonomous vehicles hold great promise in improving the future of transportation. The driving models used in these vehicles are based on neural networks, which can be difficult to validate. However, ensuring the safety of these models is crucial. Traditional field tests can be costly, time-consuming, and dangerous. To address these issues, scenario-based closed-loop simulations can simulate many hours of vehicle operation in a shorter amount of time and allow for specific investigation of important situations. Nonetheless, the detection of relevant traffic scenarios that also offer substantial testing benefits remains a significant challenge. To address this need, in this paper we build an imitation learning based trajectory prediction for traffic participants. We combine an image-based (CNN) approach to represent spatial environmental factors and a graph-based (GNN) approach to specifically represent relations between traffic participants. In our understanding, traffic scenes that are highly interactive due to the network's significant utilization of the social component are more pertinent for a validation process. Therefore, we propose to use the activity of such sub networks as a measure of interactivity of a traffic scene. We evaluate our model using a motion dataset and discuss the value of the relationship information with respect to different traffic situations.
Inverse Universal Traffic Quality -- a Criticality Metric for Crowded Urban Traffic Scenes
Apr 21, 2023



An essential requirement for scenario-based testing the identification of critical scenes and their associated scenarios. However, critical scenes, such as collisions, occur comparatively rarely. Accordingly, large amounts of data must be examined. A further issue is that recorded real-world traffic often consists of scenes with a high number of vehicles, and it can be challenging to determine which are the most critical vehicles regarding the safety of an ego vehicle. Therefore, we present the inverse universal traffic quality, a criticality metric for urban traffic independent of predefined adversary vehicles and vehicle constellations such as intersection trajectories or car-following scenarios. Our metric is universally applicable for different urban traffic situations, e.g., intersections or roundabouts, and can be adjusted to certain situations if needed. Additionally, in this paper, we evaluate the proposed metric and compares its result to other well-known criticality metrics of this field, such as time-to-collision or post-encroachment time.
A Comprehensive Review on Ontologies for Scenario-based Testing in the Context of Autonomous Driving
Apr 21, 2023

The verification and validation of autonomous driving vehicles remains a major challenge due to the high complexity of autonomous driving functions. Scenario-based testing is a promising method for validating such a complex system. Ontologies can be utilized to produce test scenarios that are both meaningful and relevant. One crucial aspect of this process is selecting the appropriate method for describing the entities involved. The level of detail and specific entity classes required will vary depending on the system being tested. It is important to choose an ontology that properly reflects these needs. This paper summarizes key representative ontologies for scenario-based testing and related use cases in the field of autonomous driving. The considered ontologies are classified according to their level of detail for both static facts and dynamic aspects. Furthermore, the ontologies are evaluated based on the presence of important entity classes and the relations between them.