 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUtilizing Hybrid Trajectory Prediction Models to Recognize Highly Interactive Traffic Scenarios
Sep 13, 2023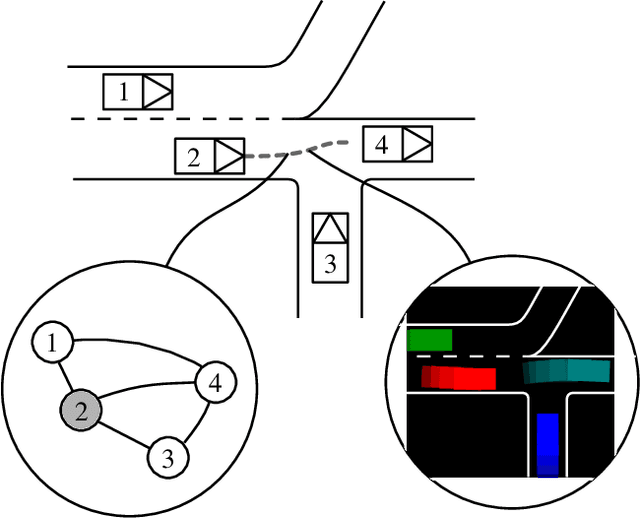



Autonomous vehicles hold great promise in improving the future of transportation. The driving models used in these vehicles are based on neural networks, which can be difficult to validate. However, ensuring the safety of these models is crucial. Traditional field tests can be costly, time-consuming, and dangerous. To address these issues, scenario-based closed-loop simulations can simulate many hours of vehicle operation in a shorter amount of time and allow for specific investigation of important situations. Nonetheless, the detection of relevant traffic scenarios that also offer substantial testing benefits remains a significant challenge. To address this need, in this paper we build an imitation learning based trajectory prediction for traffic participants. We combine an image-based (CNN) approach to represent spatial environmental factors and a graph-based (GNN) approach to specifically represent relations between traffic participants. In our understanding, traffic scenes that are highly interactive due to the network's significant utilization of the social component are more pertinent for a validation process. Therefore, we propose to use the activity of such sub networks as a measure of interactivity of a traffic scene. We evaluate our model using a motion dataset and discuss the value of the relationship information with respect to different traffic situations.