 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFool the Stoplight: Realistic Adversarial Patch Attacks on Traffic Light Detectors
Jun 05, 2025Realistic adversarial attacks on various camera-based perception tasks of autonomous vehicles have been successfully demonstrated so far. However, only a few works considered attacks on traffic light detectors. This work shows how CNNs for traffic light detection can be attacked with printed patches. We propose a threat model, where each instance of a traffic light is attacked with a patch placed under it, and describe a training strategy. We demonstrate successful adversarial patch attacks in universal settings. Our experiments show realistic targeted red-to-green label-flipping attacks and attacks on pictogram classification. Finally, we perform a real-world evaluation with printed patches and demonstrate attacks in the lab settings with a mobile traffic light for construction sites and in a test area with stationary traffic lights. Our code is available at https://github.com/KASTEL-MobilityLab/attacks-on-traffic-light-detection.
Centralized Decision-Making for Platooning By Using SPaT-Driven Reference Speeds
May 09, 2025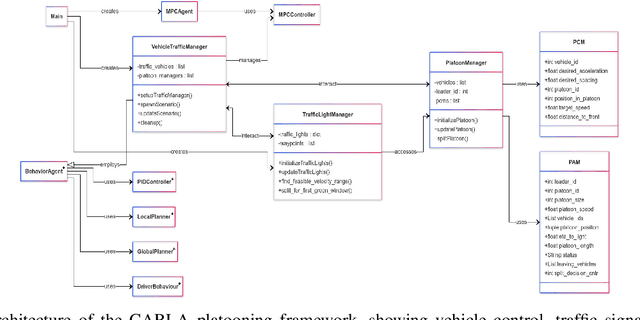



This paper introduces a centralized approach for fuel-efficient urban platooning by leveraging real-time Vehicle- to-Everything (V2X) communication and Signal Phase and Timing (SPaT) data. A nonlinear Model Predictive Control (MPC) algorithm optimizes the trajectories of platoon leader vehicles, employing an asymmetric cost function to minimize fuel-intensive acceleration. Following vehicles utilize a gap- and velocity-based control strategy, complemented by dynamic platoon splitting logic communicated through Platoon Control Messages (PCM) and Platoon Awareness Messages (PAM). Simulation results obtained from the CARLA environment demonstrate substantial fuel savings of up to 41.2%, along with smoother traffic flows, fewer vehicle stops, and improved intersection throughput.
Empowering Autonomous Shuttles with Next-Generation Infrastructure
Oct 28, 2024As cities strive to address urban mobility challenges, combining autonomous transportation technologies with intelligent infrastructure presents an opportunity to transform how people move within urban environments. Autonomous shuttles are particularly suited for adaptive and responsive public transport for the first and last mile, connecting with smart infrastructure to enhance urban transit. This paper presents the concept, implementation, and evaluation of a proof-of-concept deployment of an autonomous shuttle integrated with smart infrastructure at a public fair. The infrastructure includes two perception-equipped bus stops and a connected pedestrian intersection, all linked through a central communication and control hub. Our key contributions include the development of a comprehensive system architecture for "smart" bus stops, the integration of multiple urban locations into a cohesive smart transport ecosystem, and the creation of adaptive shuttle behavior for automated driving. Additionally, we publish an open source dataset and a Vehicle-to-X (V2X) driver to support further research. Finally, we offer an outlook on future research directions and potential expansions of the demonstrated technologies and concepts.
A Survey on Intermediate Fusion Methods for Collaborative Perception Categorized by Real World Challenges
Apr 28, 2024This survey analyzes intermediate fusion methods in collaborative perception for autonomous driving, categorized by real-world challenges. We examine various methods, detailing their features and the evaluation metrics they employ. The focus is on addressing challenges like transmission efficiency, localization errors, communication disruptions, and heterogeneity. Moreover, we explore strategies to counter adversarial attacks and defenses, as well as approaches to adapt to domain shifts. The objective is to present an overview of how intermediate fusion methods effectively meet these diverse challenges, highlighting their role in advancing the field of collaborative perception in autonomous driving.
Collaborative Perception Datasets in Autonomous Driving: A Survey
Apr 22, 2024This survey offers a comprehensive examination of collaborative perception datasets in the context of Vehicle-to-Infrastructure (V2I), Vehicle-to-Vehicle (V2V), and Vehicle-to-Everything (V2X). It highlights the latest developments in large-scale benchmarks that accelerate advancements in perception tasks for autonomous vehicles. The paper systematically analyzes a variety of datasets, comparing them based on aspects such as diversity, sensor setup, quality, public availability, and their applicability to downstream tasks. It also highlights the key challenges such as domain shift, sensor setup limitations, and gaps in dataset diversity and availability. The importance of addressing privacy and security concerns in the development of datasets is emphasized, regarding data sharing and dataset creation. The conclusion underscores the necessity for comprehensive, globally accessible datasets and collaborative efforts from both technological and research communities to overcome these challenges and fully harness the potential of autonomous driving.