 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Edge AI: Deploying Convolutional Neural Networks on FPGA with the Gemmini Accelerator
Aug 14, 2024The growing concerns regarding energy consumption and privacy have prompted the development of AI solutions deployable on the edge, circumventing the substantial CO2 emissions associated with cloud servers and mitigating risks related to sharing sensitive data. But deploying Convolutional Neural Networks (CNNs) on non-off-the-shelf edge devices remains a complex and labor-intensive task. In this paper, we present and end-to-end workflow for deployment of CNNs on Field Programmable Gate Arrays (FPGAs) using the Gemmini accelerator, which we modified for efficient implementation on FPGAs. We describe how we leverage the use of open source software on each optimization step of the deployment process, the customizations we added to them and its impact on the final system's performance. We were able to achieve real-time performance by deploying a YOLOv7 model on a Xilinx ZCU102 FPGA with an energy efficiency of 36.5 GOP/s/W. Our FPGA-based solution demonstrates superior power efficiency compared with other embedded hardware devices, and even outperforms other FPGA reference implementations. Finally, we present how this kind of solution can be integrated into a wider system, by testing our proposed platform in a traffic monitoring scenario.
A Survey on Intermediate Fusion Methods for Collaborative Perception Categorized by Real World Challenges
Apr 28, 2024This survey analyzes intermediate fusion methods in collaborative perception for autonomous driving, categorized by real-world challenges. We examine various methods, detailing their features and the evaluation metrics they employ. The focus is on addressing challenges like transmission efficiency, localization errors, communication disruptions, and heterogeneity. Moreover, we explore strategies to counter adversarial attacks and defenses, as well as approaches to adapt to domain shifts. The objective is to present an overview of how intermediate fusion methods effectively meet these diverse challenges, highlighting their role in advancing the field of collaborative perception in autonomous driving.
CoCar NextGen: a Multi-Purpose Platform for Connected Autonomous Driving Research
Apr 26, 2024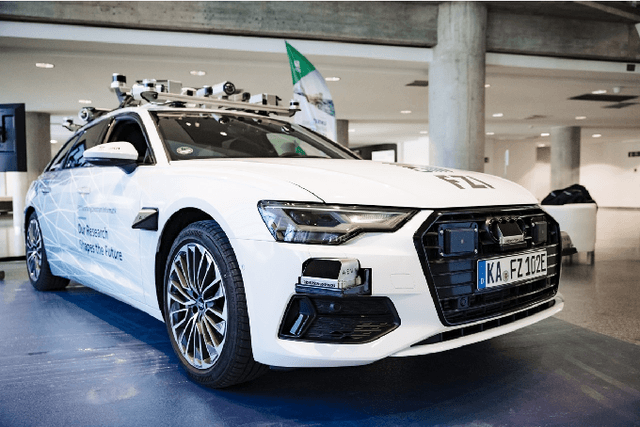
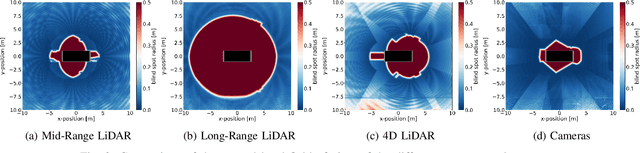
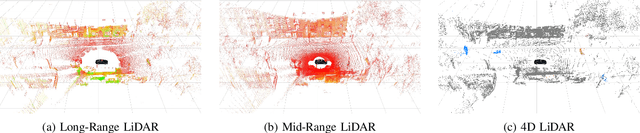
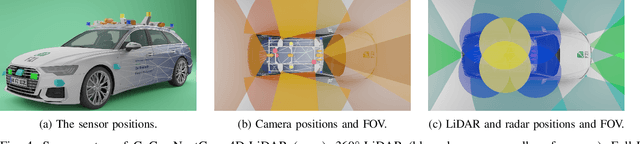
Real world testing is of vital importance to the success of automated driving. While many players in the business design purpose build testing vehicles, we designed and build a modular platform that offers high flexibility for any kind of scenario. CoCar NextGen is equipped with next generation hardware that addresses all future use cases. Its extensive, redundant sensor setup allows to develop cross-domain data driven approaches that manage the transfer to other sensor setups. Together with the possibility of being deployed on public roads, this creates a unique research platform that supports the road to automated driving on SAE Level 5.
One Stack to Rule them All: To Drive Automated Vehicles, and Reach for the 4th level
Apr 03, 2024



Most automated driving functions are designed for a specific task or vehicle. Most often, the underlying architecture is fixed to specific algorithms to increase performance. Therefore, it is not possible to deploy new modules and algorithms easily. In this paper, we present our automated driving stack which combines both scalability and adaptability. Due to the modular design, our stack allows for a fast integration and testing of novel and state-of-the-art research approaches. Furthermore, it is flexible to be used for our different testing vehicles, including modified EasyMile EZ10 shuttles and different passenger cars. These vehicles differ in multiple ways, e.g. sensor setups, control systems, maximum speed, or steering angle limitations. Finally, our stack is deployed in real world environments, including passenger transport in urban areas. Our stack includes all components needed for operating an autonomous vehicle, including localization, perception, planning, controller, and additional safety modules. Our stack is developed, tested, and evaluated in real world traffic in multiple test sites, including the Test Area Autonomous Driving Baden-W\"urttemberg.
Analyzing Deep Learning Representations of Point Clouds for Real-Time In-Vehicle LiDAR Perception
Nov 02, 2022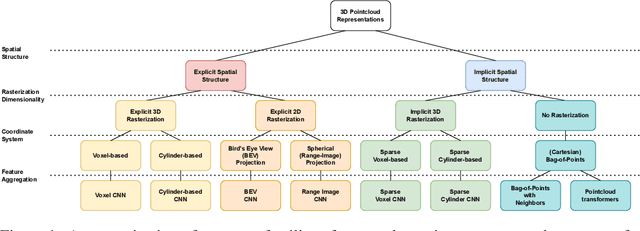
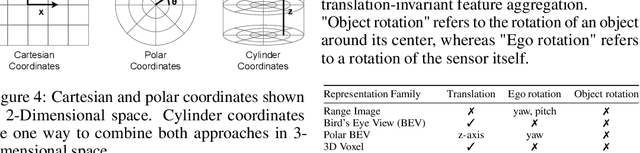
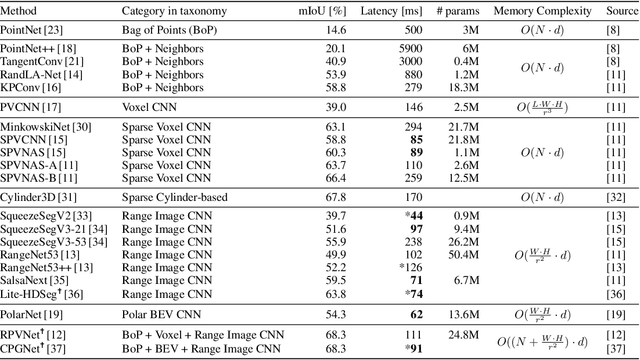
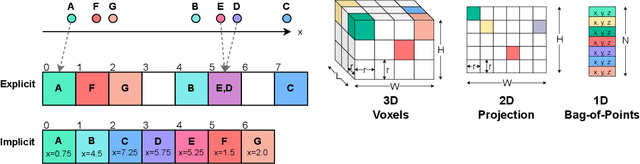
LiDAR sensors are an integral part of modern autonomous vehicles as they provide an accurate, high-resolution 3D representation of the vehicle's surroundings. However, it is computationally difficult to make use of the ever-increasing amounts of data from multiple high-resolution LiDAR sensors. As frame-rates, point cloud sizes and sensor resolutions increase, real-time processing of these point clouds must still extract semantics from this increasingly precise picture of the vehicle's environment. One deciding factor of the run-time performance and accuracy of deep neural networks operating on these point clouds is the underlying data representation and the way it is computed. In this work, we examine the relationship between the computational representations used in neural networks and their performance characteristics. To this end, we propose a novel computational taxonomy of LiDAR point cloud representations used in modern deep neural networks for 3D point cloud processing. Using this taxonomy, we perform a structured analysis of different families of approaches. Thereby, we uncover common advantages and limitations in terms of computational efficiency, memory requirements, and representational capacity as measured by semantic segmentation performance. Finally, we provide some insights and guidance for future developments in neural point cloud processing methods.