 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRuntime Safety Monitoring of Deep Neural Networks for Perception: A Survey
Nov 08, 2025Deep neural networks (DNNs) are widely used in perception systems for safety-critical applications, such as autonomous driving and robotics. However, DNNs remain vulnerable to various safety concerns, including generalization errors, out-of-distribution (OOD) inputs, and adversarial attacks, which can lead to hazardous failures. This survey provides a comprehensive overview of runtime safety monitoring approaches, which operate in parallel to DNNs during inference to detect these safety concerns without modifying the DNN itself. We categorize existing methods into three main groups: Monitoring inputs, internal representations, and outputs. We analyze the state-of-the-art for each category, identify strengths and limitations, and map methods to the safety concerns they address. In addition, we highlight open challenges and future research directions.
DigiT4TAF -- Bridging Physical and Digital Worlds for Future Transportation Systems
Jul 03, 2025In the future, mobility will be strongly shaped by the increasing use of digitalization. Not only will individual road users be highly interconnected, but also the road and associated infrastructure. At that point, a Digital Twin becomes particularly appealing because, unlike a basic simulation, it offers a continuous, bilateral connection linking the real and virtual environments. This paper describes the digital reconstruction used to develop the Digital Twin of the Test Area Autonomous Driving-Baden-W\"urttemberg (TAF-BW), Germany. The TAF-BW offers a variety of different road sections, from high-traffic urban intersections and tunnels to multilane motorways. The test area is equipped with a comprehensive Vehicle-to-Everything (V2X) communication infrastructure and multiple intelligent intersections equipped with camera sensors to facilitate real-time traffic flow monitoring. The generation of authentic data as input for the Digital Twin was achieved by extracting object lists at the intersections. This process was facilitated by the combined utilization of camera images from the intelligent infrastructure and LiDAR sensors mounted on a test vehicle. Using a unified interface, recordings from real-world detections of traffic participants can be resimulated. Additionally, the simulation framework's design and the reconstruction process is discussed. The resulting framework is made publicly available for download and utilization at: https://digit4taf-bw.fzi.de The demonstration uses two case studies to illustrate the application of the digital twin and its interfaces: the analysis of traffic signal systems to optimize traffic flow and the simulation of security-related scenarios in the communications sector.
Modular Fault Diagnosis Framework for Complex Autonomous Driving Systems
Nov 14, 2024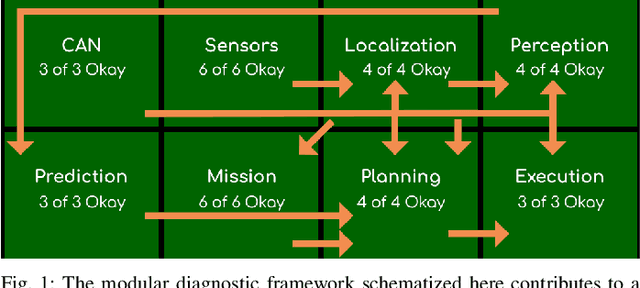
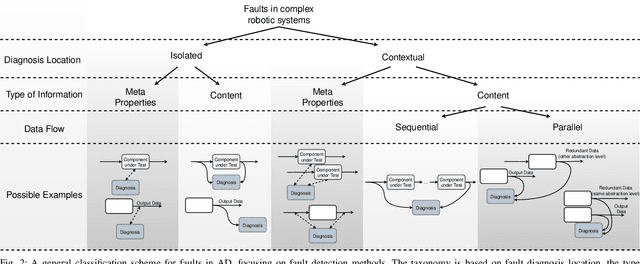
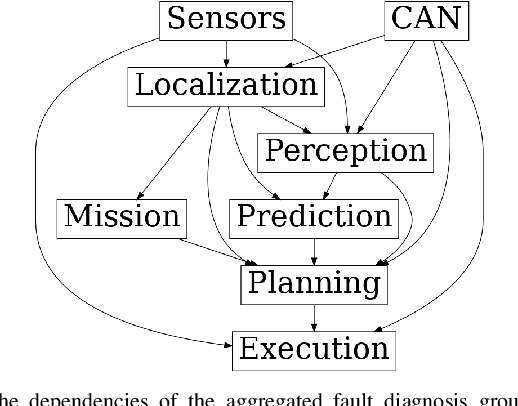
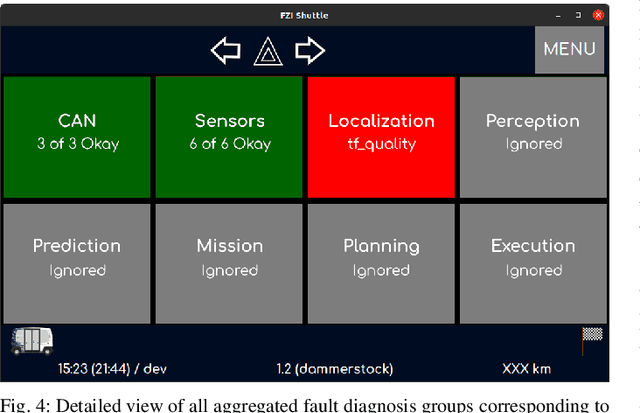
Fault diagnosis is crucial for complex autonomous mobile systems, especially for modern-day autonomous driving (AD). Different actors, numerous use cases, and complex heterogeneous components motivate a fault diagnosis of the system and overall system integrity. AD systems are composed of many heterogeneous components, each with different functionality and possibly using a different algorithm (e.g., rule-based vs. AI components). In addition, these components are subject to the vehicle's driving state and are highly dependent. This paper, therefore, faces this problem by presenting the concept of a modular fault diagnosis framework for AD systems. The concept suggests modular state monitoring and diagnosis elements, together with a state- and dependency-aware aggregation method. Our proposed classification scheme allows for the categorization of the fault diagnosis modules. The concept is implemented on AD shuttle buses and evaluated to demonstrate its capabilities.
Empowering Autonomous Shuttles with Next-Generation Infrastructure
Oct 28, 2024As cities strive to address urban mobility challenges, combining autonomous transportation technologies with intelligent infrastructure presents an opportunity to transform how people move within urban environments. Autonomous shuttles are particularly suited for adaptive and responsive public transport for the first and last mile, connecting with smart infrastructure to enhance urban transit. This paper presents the concept, implementation, and evaluation of a proof-of-concept deployment of an autonomous shuttle integrated with smart infrastructure at a public fair. The infrastructure includes two perception-equipped bus stops and a connected pedestrian intersection, all linked through a central communication and control hub. Our key contributions include the development of a comprehensive system architecture for "smart" bus stops, the integration of multiple urban locations into a cohesive smart transport ecosystem, and the creation of adaptive shuttle behavior for automated driving. Additionally, we publish an open source dataset and a Vehicle-to-X (V2X) driver to support further research. Finally, we offer an outlook on future research directions and potential expansions of the demonstrated technologies and concepts.
One Stack to Rule them All: To Drive Automated Vehicles, and Reach for the 4th level
Apr 03, 2024



Most automated driving functions are designed for a specific task or vehicle. Most often, the underlying architecture is fixed to specific algorithms to increase performance. Therefore, it is not possible to deploy new modules and algorithms easily. In this paper, we present our automated driving stack which combines both scalability and adaptability. Due to the modular design, our stack allows for a fast integration and testing of novel and state-of-the-art research approaches. Furthermore, it is flexible to be used for our different testing vehicles, including modified EasyMile EZ10 shuttles and different passenger cars. These vehicles differ in multiple ways, e.g. sensor setups, control systems, maximum speed, or steering angle limitations. Finally, our stack is deployed in real world environments, including passenger transport in urban areas. Our stack includes all components needed for operating an autonomous vehicle, including localization, perception, planning, controller, and additional safety modules. Our stack is developed, tested, and evaluated in real world traffic in multiple test sites, including the Test Area Autonomous Driving Baden-W\"urttemberg.