 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOne Stack to Rule them All: To Drive Automated Vehicles, and Reach for the 4th level
Apr 03, 2024



Most automated driving functions are designed for a specific task or vehicle. Most often, the underlying architecture is fixed to specific algorithms to increase performance. Therefore, it is not possible to deploy new modules and algorithms easily. In this paper, we present our automated driving stack which combines both scalability and adaptability. Due to the modular design, our stack allows for a fast integration and testing of novel and state-of-the-art research approaches. Furthermore, it is flexible to be used for our different testing vehicles, including modified EasyMile EZ10 shuttles and different passenger cars. These vehicles differ in multiple ways, e.g. sensor setups, control systems, maximum speed, or steering angle limitations. Finally, our stack is deployed in real world environments, including passenger transport in urban areas. Our stack includes all components needed for operating an autonomous vehicle, including localization, perception, planning, controller, and additional safety modules. Our stack is developed, tested, and evaluated in real world traffic in multiple test sites, including the Test Area Autonomous Driving Baden-W\"urttemberg.
Heterogeneous Graph-based Trajectory Prediction using Local Map Context and Social Interactions
Nov 30, 2023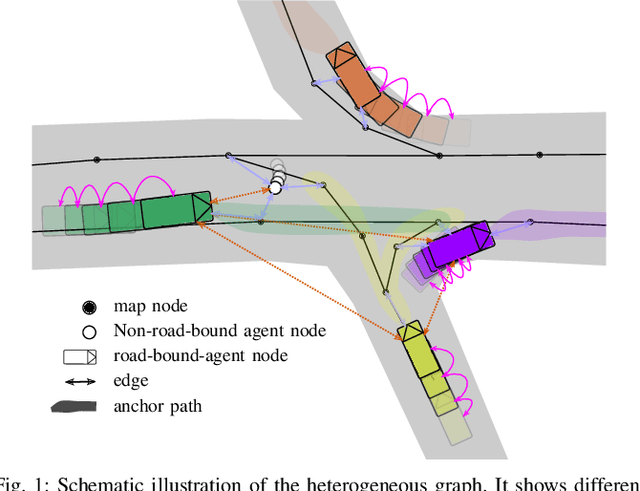
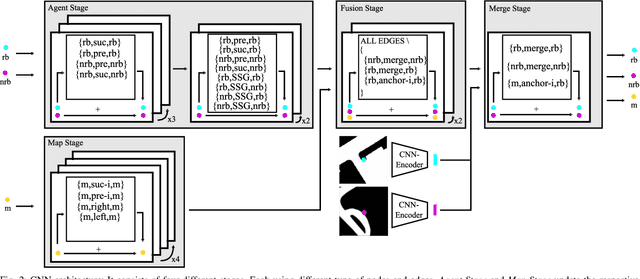
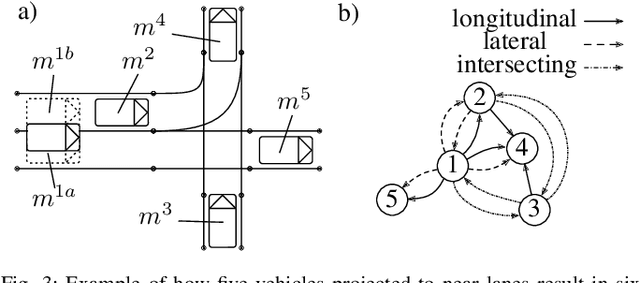
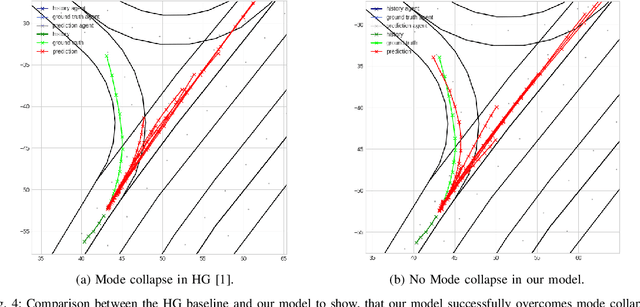
Precisely predicting the future trajectories of surrounding traffic participants is a crucial but challenging problem in autonomous driving, due to complex interactions between traffic agents, map context and traffic rules. Vector-based approaches have recently shown to achieve among the best performances on trajectory prediction benchmarks. These methods model simple interactions between traffic agents but don't distinguish between relation-type and attributes like their distance along the road. Furthermore, they represent lanes only by sequences of vectors representing center lines and ignore context information like lane dividers and other road elements. We present a novel approach for vector-based trajectory prediction that addresses these shortcomings by leveraging three crucial sources of information: First, we model interactions between traffic agents by a semantic scene graph, that accounts for the nature and important features of their relation. Second, we extract agent-centric image-based map features to model the local map context. Finally, we generate anchor paths to enforce the policy in multi-modal prediction to permitted trajectories only. Each of these three enhancements shows advantages over the baseline model HoliGraph.
Holistic Graph-based Motion Prediction
Jan 31, 2023



Motion prediction for automated vehicles in complex environments is a difficult task that is to be mastered when automated vehicles are to be used in arbitrary situations. Many factors influence the future motion of traffic participants starting with traffic rules and reaching from the interaction between each other to personal habits of human drivers. Therefore we present a novel approach for a graph-based prediction based on a heterogeneous holistic graph representation that combines temporal information, properties and relations between traffic participants as well as relations with static elements like the road network. The information are encoded through different types of nodes and edges that both are enriched with arbitrary features. We evaluated the approach on the INTERACTION and the Argoverse dataset and conducted an informative ablation study to demonstrate the benefit of different types of information for the motion prediction quality.