 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModular Fault Diagnosis Framework for Complex Autonomous Driving Systems
Nov 14, 2024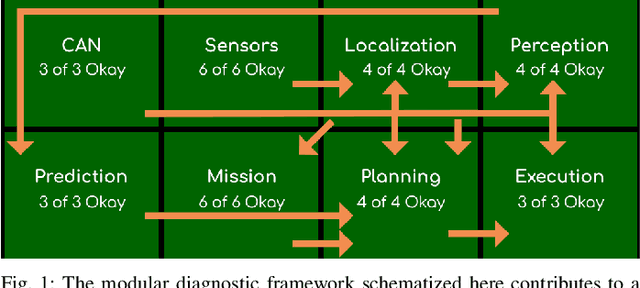
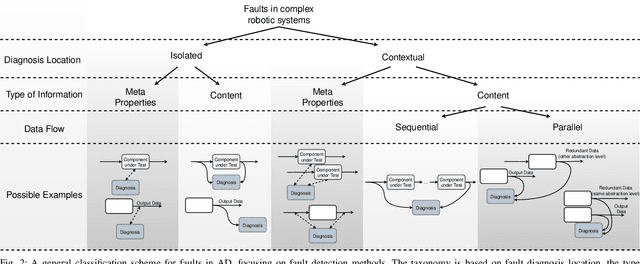
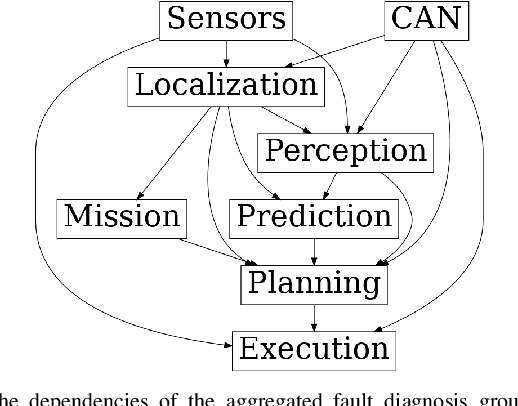
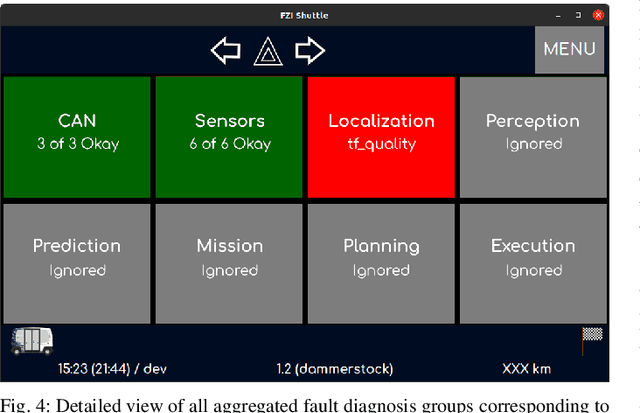
Fault diagnosis is crucial for complex autonomous mobile systems, especially for modern-day autonomous driving (AD). Different actors, numerous use cases, and complex heterogeneous components motivate a fault diagnosis of the system and overall system integrity. AD systems are composed of many heterogeneous components, each with different functionality and possibly using a different algorithm (e.g., rule-based vs. AI components). In addition, these components are subject to the vehicle's driving state and are highly dependent. This paper, therefore, faces this problem by presenting the concept of a modular fault diagnosis framework for AD systems. The concept suggests modular state monitoring and diagnosis elements, together with a state- and dependency-aware aggregation method. Our proposed classification scheme allows for the categorization of the fault diagnosis modules. The concept is implemented on AD shuttle buses and evaluated to demonstrate its capabilities.
Empowering Autonomous Shuttles with Next-Generation Infrastructure
Oct 28, 2024As cities strive to address urban mobility challenges, combining autonomous transportation technologies with intelligent infrastructure presents an opportunity to transform how people move within urban environments. Autonomous shuttles are particularly suited for adaptive and responsive public transport for the first and last mile, connecting with smart infrastructure to enhance urban transit. This paper presents the concept, implementation, and evaluation of a proof-of-concept deployment of an autonomous shuttle integrated with smart infrastructure at a public fair. The infrastructure includes two perception-equipped bus stops and a connected pedestrian intersection, all linked through a central communication and control hub. Our key contributions include the development of a comprehensive system architecture for "smart" bus stops, the integration of multiple urban locations into a cohesive smart transport ecosystem, and the creation of adaptive shuttle behavior for automated driving. Additionally, we publish an open source dataset and a Vehicle-to-X (V2X) driver to support further research. Finally, we offer an outlook on future research directions and potential expansions of the demonstrated technologies and concepts.
One Stack to Rule them All: To Drive Automated Vehicles, and Reach for the 4th level
Apr 03, 2024



Most automated driving functions are designed for a specific task or vehicle. Most often, the underlying architecture is fixed to specific algorithms to increase performance. Therefore, it is not possible to deploy new modules and algorithms easily. In this paper, we present our automated driving stack which combines both scalability and adaptability. Due to the modular design, our stack allows for a fast integration and testing of novel and state-of-the-art research approaches. Furthermore, it is flexible to be used for our different testing vehicles, including modified EasyMile EZ10 shuttles and different passenger cars. These vehicles differ in multiple ways, e.g. sensor setups, control systems, maximum speed, or steering angle limitations. Finally, our stack is deployed in real world environments, including passenger transport in urban areas. Our stack includes all components needed for operating an autonomous vehicle, including localization, perception, planning, controller, and additional safety modules. Our stack is developed, tested, and evaluated in real world traffic in multiple test sites, including the Test Area Autonomous Driving Baden-W\"urttemberg.
Taxonomy and Survey on Remote Human Input Systems for Driving Automation Systems
Sep 29, 2021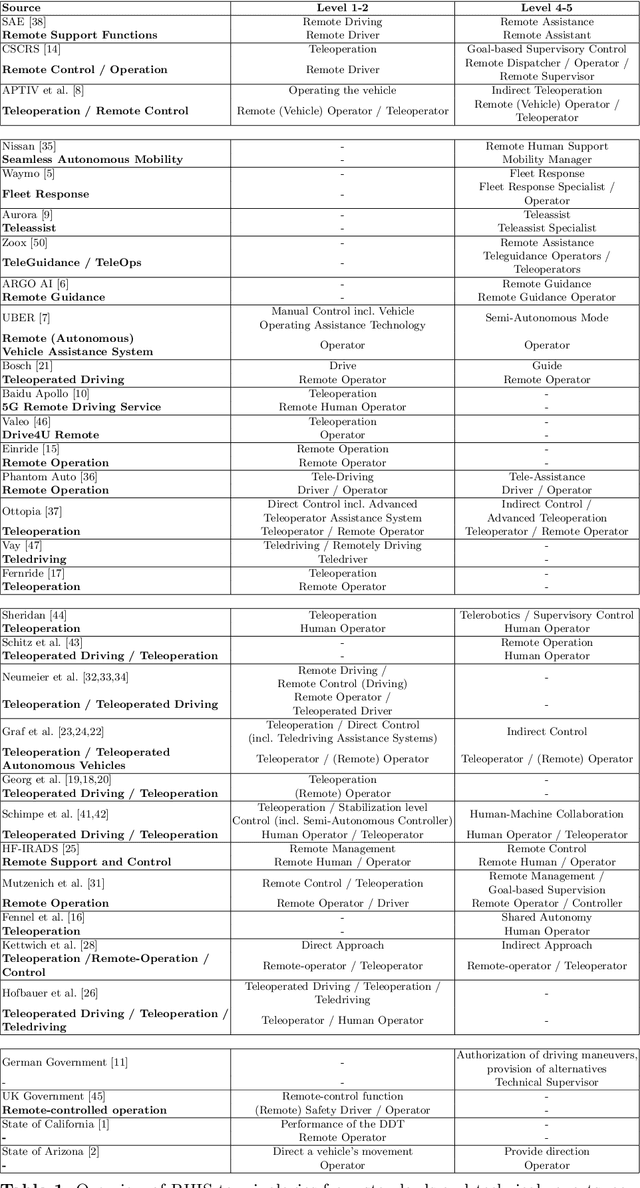
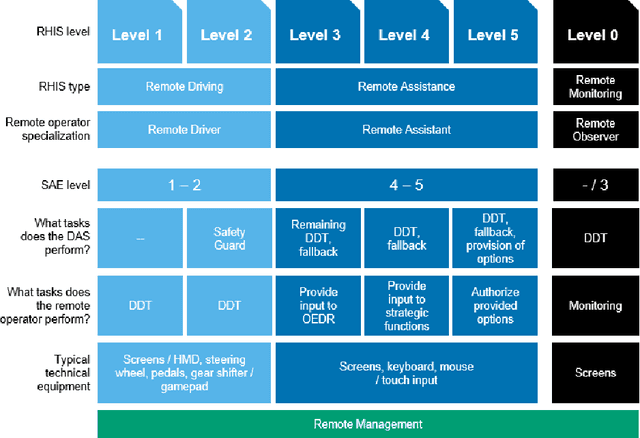
Corner cases for driving automation systems can often be detected by the system itself and subsequently resolved by remote humans. There exists a wide variety of technical approaches on how remote humans can resolve such issues. Over multiple domains, no common taxonomy on those approaches has developed yet, though. As the scaling of automated driving systems continues to increase, a uniform taxonomy is desirable to improve communication within the scientific community, but also beyond to policymakers and the general public. In this paper, we provide a survey on recent terminologies and propose a taxonomy for remote human input systems, classifying the different approaches based on their complexity.
KIGLIS: Smart Networks for Smart Cities
Jun 09, 2021
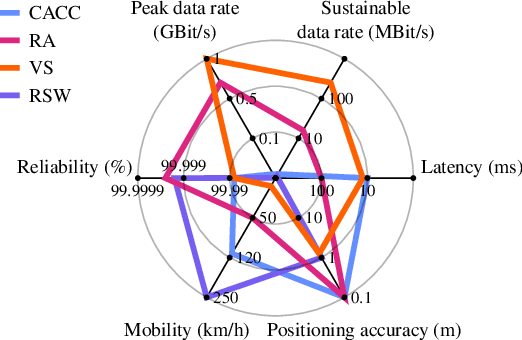
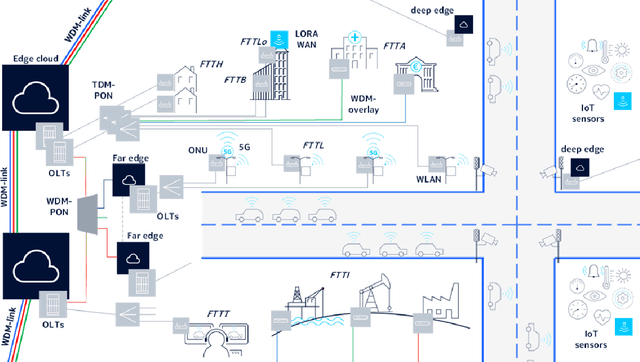
Smart cities will be characterized by a variety of intelligent and networked services, each with specific requirements for the underlying network infrastructure. While smart city architectures and services have been studied extensively, little attention has been paid to the network technology. The KIGLIS research project, consisting of a consortium of companies, universities and research institutions, focuses on artificial intelligence for optimizing fiber-optic networks of a smart city, with a special focus on future mobility applications, such as automated driving. In this paper, we present early results on our process of collecting smart city requirements for communication networks, which will lead towards reference infrastructure and architecture solutions. Finally, we suggest directions in which artificial intelligence will improve smart city networks.