 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComplementary Learning for Real-World Model Failure Detection
Jul 19, 2024In real-world autonomous driving, deep learning models can experience performance degradation due to distributional shifts between the training data and the driving conditions encountered. As is typical in machine learning, it is difficult to acquire a large and potentially representative labeled test set to validate models in preparation for deployment in the wild. In this work, we introduce complementary learning, where we use learned characteristics from different training paradigms to detect model errors. We demonstrate our approach by learning semantic and predictive motion labels in point clouds in a supervised and self-supervised manner and detect and classify model discrepancies subsequently. We perform a large-scale qualitative analysis and present LidarCODA, the first dataset with labeled anomalies in lidar point clouds, for an extensive quantitative analysis.
KIGLIS: Smart Networks for Smart Cities
Jun 09, 2021
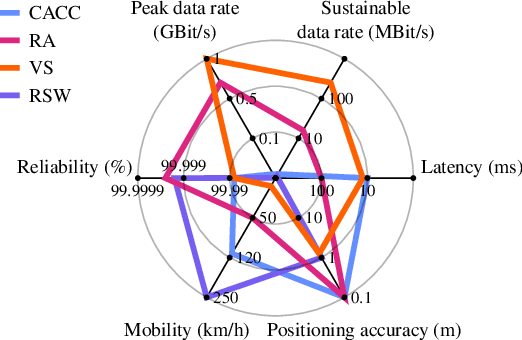
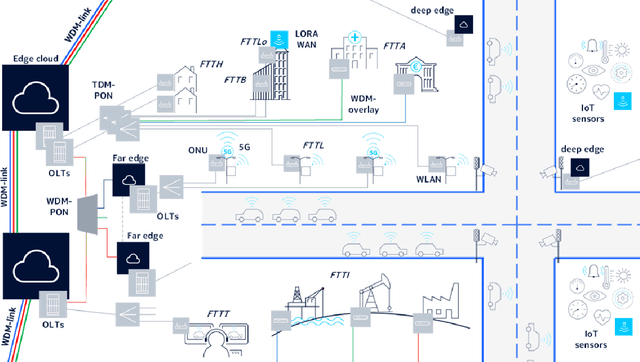
Smart cities will be characterized by a variety of intelligent and networked services, each with specific requirements for the underlying network infrastructure. While smart city architectures and services have been studied extensively, little attention has been paid to the network technology. The KIGLIS research project, consisting of a consortium of companies, universities and research institutions, focuses on artificial intelligence for optimizing fiber-optic networks of a smart city, with a special focus on future mobility applications, such as automated driving. In this paper, we present early results on our process of collecting smart city requirements for communication networks, which will lead towards reference infrastructure and architecture solutions. Finally, we suggest directions in which artificial intelligence will improve smart city networks.