 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMcity Data Engine: Iterative Model Improvement Through Open-Vocabulary Data Selection
Apr 30, 2025With an ever-increasing availability of data, it has become more and more challenging to select and label appropriate samples for the training of machine learning models. It is especially difficult to detect long-tail classes of interest in large amounts of unlabeled data. This holds especially true for Intelligent Transportation Systems (ITS), where vehicle fleets and roadside perception systems generate an abundance of raw data. While industrial, proprietary data engines for such iterative data selection and model training processes exist, researchers and the open-source community suffer from a lack of an openly available system. We present the Mcity Data Engine, which provides modules for the complete data-based development cycle, beginning at the data acquisition phase and ending at the model deployment stage. The Mcity Data Engine focuses on rare and novel classes through an open-vocabulary data selection process. All code is publicly available on GitHub under an MIT license: https://github.com/mcity/mcity_data_engine
Complementary Learning for Real-World Model Failure Detection
Jul 19, 2024In real-world autonomous driving, deep learning models can experience performance degradation due to distributional shifts between the training data and the driving conditions encountered. As is typical in machine learning, it is difficult to acquire a large and potentially representative labeled test set to validate models in preparation for deployment in the wild. In this work, we introduce complementary learning, where we use learned characteristics from different training paradigms to detect model errors. We demonstrate our approach by learning semantic and predictive motion labels in point clouds in a supervised and self-supervised manner and detect and classify model discrepancies subsequently. We perform a large-scale qualitative analysis and present LidarCODA, the first dataset with labeled anomalies in lidar point clouds, for an extensive quantitative analysis.
Hybrid Video Anomaly Detection for Anomalous Scenarios in Autonomous Driving
Jun 10, 2024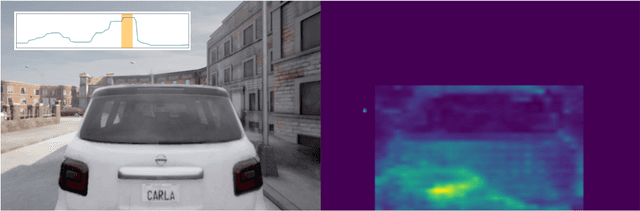

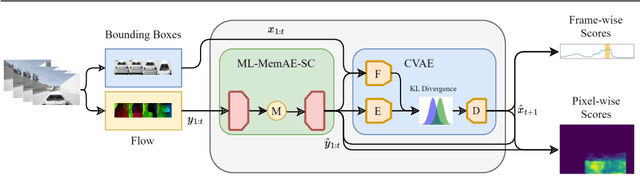
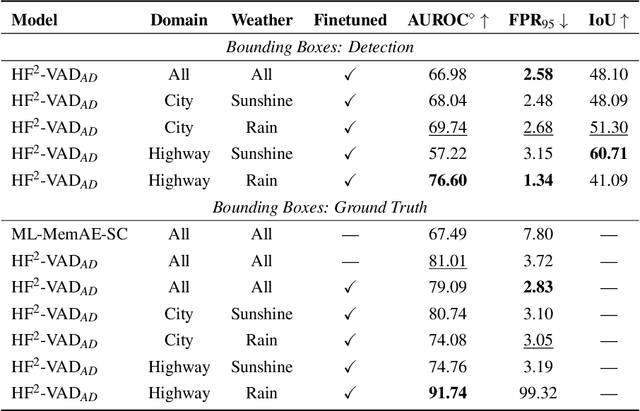
In autonomous driving, the most challenging scenarios are the ones that can only be detected within their temporal context. Most video anomaly detection approaches focus either on surveillance or traffic accidents, which are only a subfield of autonomous driving. In this work, we present HF$^2$-VAD$_{AD}$, a variation of the HF$^2$-VAD surveillance video anomaly detection method for autonomous driving. We learn a representation of normality from a vehicle's ego perspective and evaluate pixel-wise anomaly detections in rare and critical scenarios.
UMAD: Unsupervised Mask-Level Anomaly Detection for Autonomous Driving
Jun 10, 2024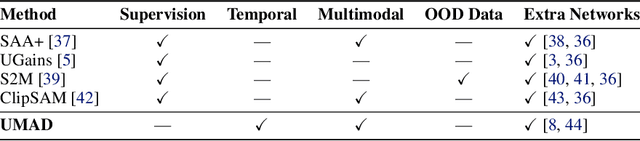
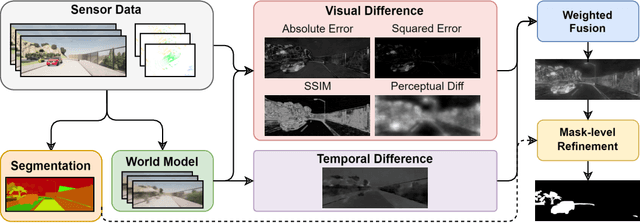
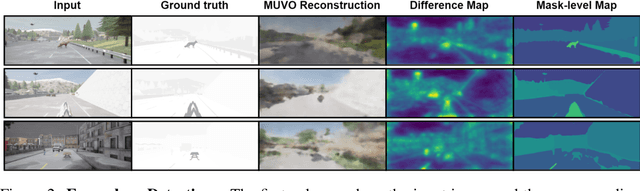
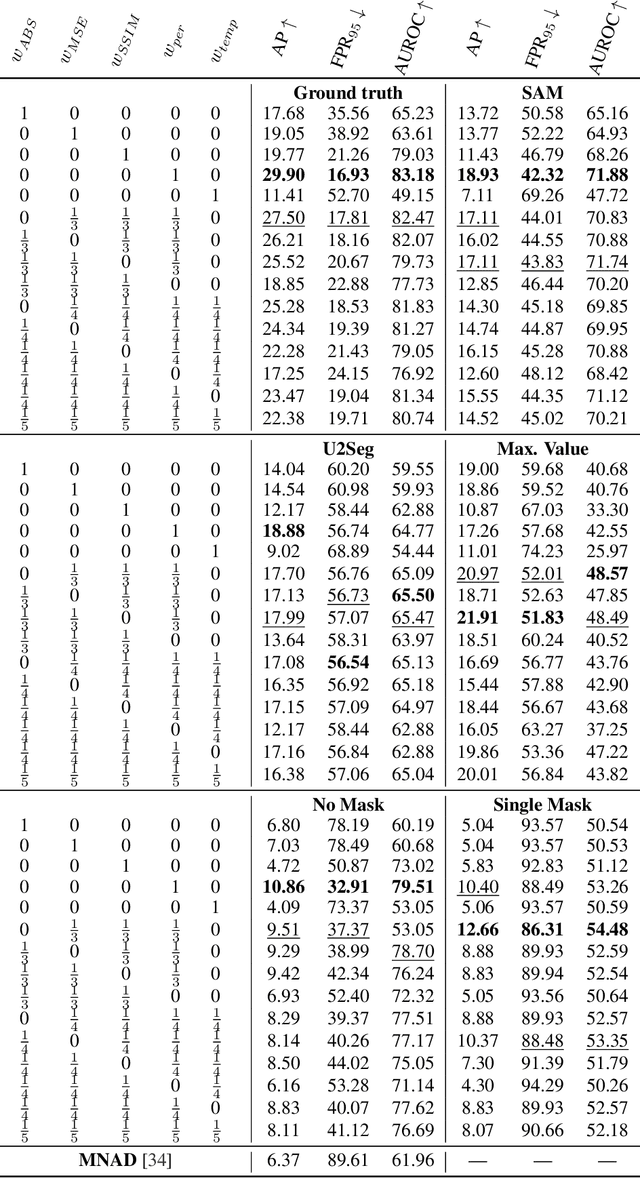
Dealing with atypical traffic scenarios remains a challenging task in autonomous driving. However, most anomaly detection approaches cannot be trained on raw sensor data but require exposure to outlier data and powerful semantic segmentation models trained in a supervised fashion. This limits the representation of normality to labeled data, which does not scale well. In this work, we revisit unsupervised anomaly detection and present UMAD, leveraging generative world models and unsupervised image segmentation. Our method outperforms state-of-the-art unsupervised anomaly detection.
AnoVox: A Benchmark for Multimodal Anomaly Detection in Autonomous Driving
May 13, 2024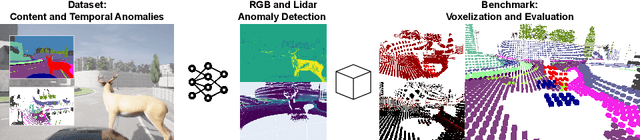
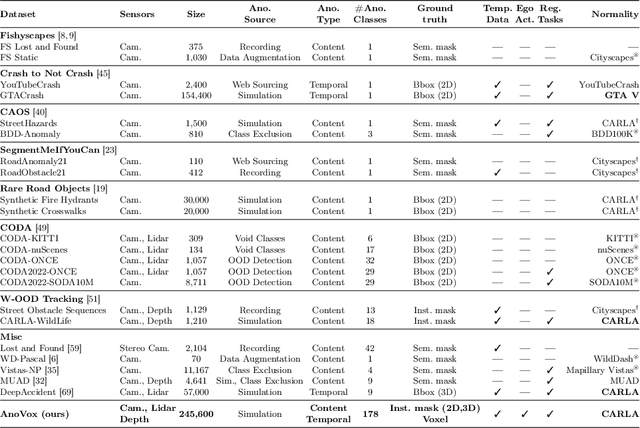
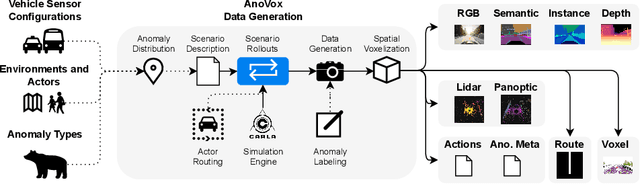
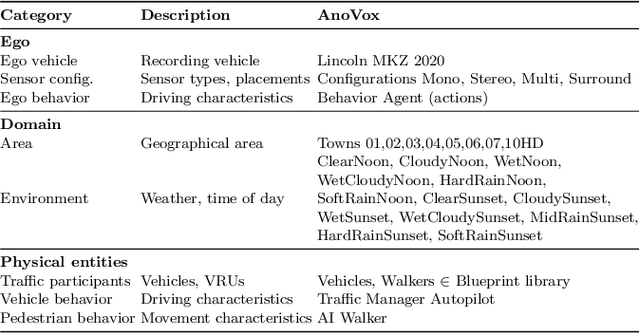
The scale-up of autonomous vehicles depends heavily on their ability to deal with anomalies, such as rare objects on the road. In order to handle such situations, it is necessary to detect anomalies in the first place. Anomaly detection for autonomous driving has made great progress in the past years but suffers from poorly designed benchmarks with a strong focus on camera data. In this work, we propose AnoVox, the largest benchmark for ANOmaly detection in autonomous driving to date. AnoVox incorporates large-scale multimodal sensor data and spatial VOXel ground truth, allowing for the comparison of methods independent of their used sensor. We propose a formal definition of normality and provide a compliant training dataset. AnoVox is the first benchmark to contain both content and temporal anomalies.
One Stack to Rule them All: To Drive Automated Vehicles, and Reach for the 4th level
Apr 03, 2024



Most automated driving functions are designed for a specific task or vehicle. Most often, the underlying architecture is fixed to specific algorithms to increase performance. Therefore, it is not possible to deploy new modules and algorithms easily. In this paper, we present our automated driving stack which combines both scalability and adaptability. Due to the modular design, our stack allows for a fast integration and testing of novel and state-of-the-art research approaches. Furthermore, it is flexible to be used for our different testing vehicles, including modified EasyMile EZ10 shuttles and different passenger cars. These vehicles differ in multiple ways, e.g. sensor setups, control systems, maximum speed, or steering angle limitations. Finally, our stack is deployed in real world environments, including passenger transport in urban areas. Our stack includes all components needed for operating an autonomous vehicle, including localization, perception, planning, controller, and additional safety modules. Our stack is developed, tested, and evaluated in real world traffic in multiple test sites, including the Test Area Autonomous Driving Baden-W\"urttemberg.
Informed Reinforcement Learning for Situation-Aware Traffic Rule Exceptions
Feb 06, 2024Reinforcement Learning is a highly active research field with promising advancements. In the field of autonomous driving, however, often very simple scenarios are being examined. Common approaches use non-interpretable control commands as the action space and unstructured reward designs which lack structure. In this work, we introduce Informed Reinforcement Learning, where a structured rulebook is integrated as a knowledge source. We learn trajectories and asses them with a situation-aware reward design, leading to a dynamic reward which allows the agent to learn situations which require controlled traffic rule exceptions. Our method is applicable to arbitrary RL models. We successfully demonstrate high completion rates of complex scenarios with recent model-based agents.
On The Impact of Replacing Private Cars with Autonomous Shuttles: An Agent-Based Approach
Nov 27, 2023



The European Green Deal aims to achieve climate neutrality by 2050, requiring the transportation industry to improve emission efficiency as it accounts for 20% of global CO2 emissions. This study uses an agent-based simulation to analyze the sustainability impacts of shared autonomous shuttles. We forecast travel demands for 2050 and simulate regulatory interventions in the form of replacing private cars with a fleet of shared autonomous shuttles in specific areas. We derive driving-related emissions, energy consumption, and non-driving-related emissions to calculate life-cycle emissions. We observe reduced life-cycle emissions from 0.4% to 9.6% and reduced energy consumption from 1.5% to 12.2%.
MUVO: A Multimodal Generative World Model for Autonomous Driving with Geometric Representations
Nov 23, 2023



Learning unsupervised world models for autonomous driving has the potential to improve the reasoning capabilities of today's systems dramatically. However, most work neglects the physical attributes of the world and focuses on sensor data alone. We propose MUVO, a MUltimodal World Model with Geometric VOxel Representations to address this challenge. We utilize raw camera and lidar data to learn a sensor-agnostic geometric representation of the world, which can directly be used by downstream tasks, such as planning. We demonstrate multimodal future predictions and show that our geometric representation improves the prediction quality of both camera images and lidar point clouds.
Conditioning Latent-Space Clusters for Real-World Anomaly Classification
Sep 18, 2023Anomalies in the domain of autonomous driving are a major hindrance to the large-scale deployment of autonomous vehicles. In this work, we focus on high-resolution camera data from urban scenes that include anomalies of various types and sizes. Based on a Variational Autoencoder, we condition its latent space to classify samples as either normal data or anomalies. In order to emphasize especially small anomalies, we perform experiments where we provide the VAE with a discrepancy map as an additional input, evaluating its impact on the detection performance. Our method separates normal data and anomalies into isolated clusters while still reconstructing high-quality images, leading to meaningful latent representations.