 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnoVox: A Benchmark for Multimodal Anomaly Detection in Autonomous Driving
Paper and Code
May 13, 2024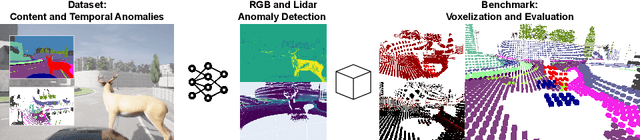
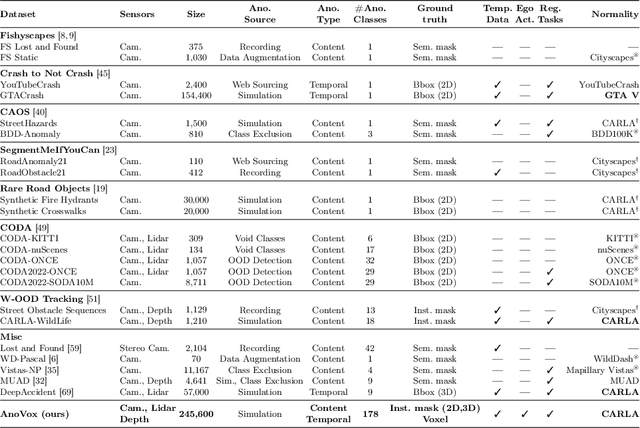
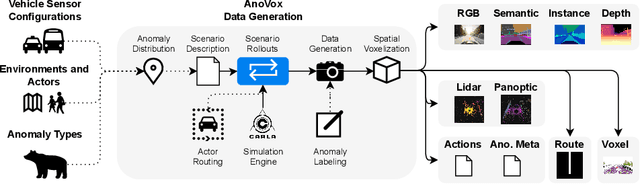
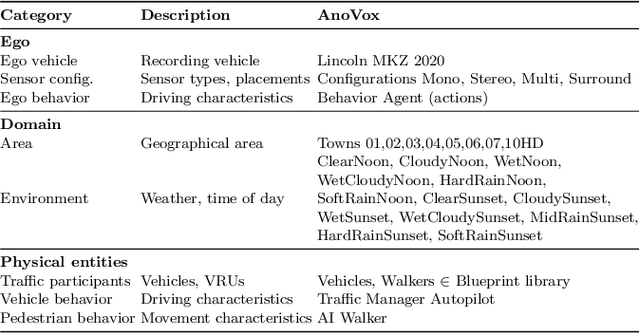
The scale-up of autonomous vehicles depends heavily on their ability to deal with anomalies, such as rare objects on the road. In order to handle such situations, it is necessary to detect anomalies in the first place. Anomaly detection for autonomous driving has made great progress in the past years but suffers from poorly designed benchmarks with a strong focus on camera data. In this work, we propose AnoVox, the largest benchmark for ANOmaly detection in autonomous driving to date. AnoVox incorporates large-scale multimodal sensor data and spatial VOXel ground truth, allowing for the comparison of methods independent of their used sensor. We propose a formal definition of normality and provide a compliant training dataset. AnoVox is the first benchmark to contain both content and temporal anomalies.