Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Video Anomaly Detection for Anomalous Scenarios in Autonomous Driving
Paper and Code
Jun 10, 2024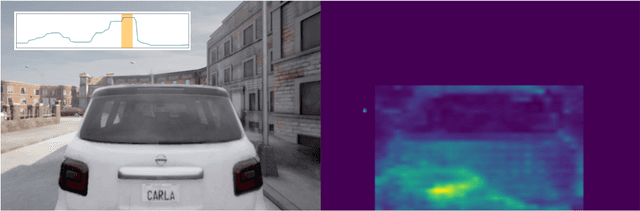

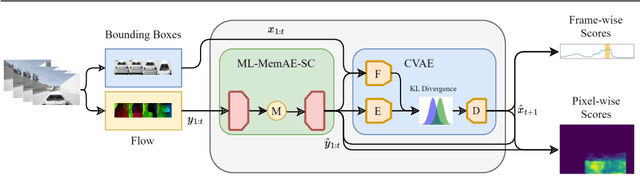
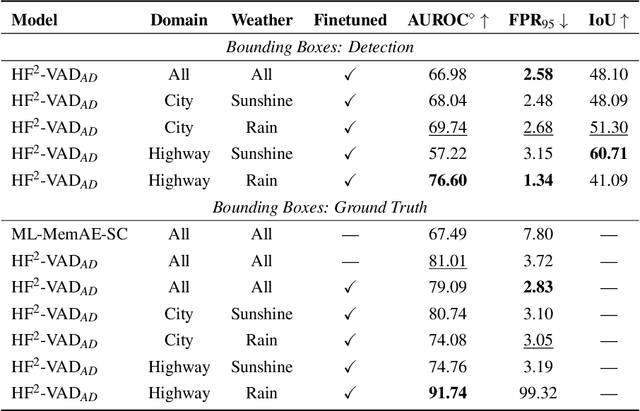
In autonomous driving, the most challenging scenarios are the ones that can only be detected within their temporal context. Most video anomaly detection approaches focus either on surveillance or traffic accidents, which are only a subfield of autonomous driving. In this work, we present HF$^2$-VAD$_{AD}$, a variation of the HF$^2$-VAD surveillance video anomaly detection method for autonomous driving. We learn a representation of normality from a vehicle's ego perspective and evaluate pixel-wise anomaly detections in rare and critical scenarios.
* Daniel Bogdoll and Jan Imhof contributed equally
View paper on