Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUMAD: Unsupervised Mask-Level Anomaly Detection for Autonomous Driving
Jun 10, 2024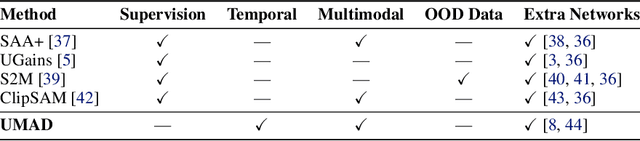
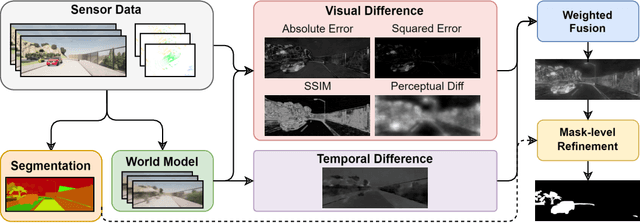
Dealing with atypical traffic scenarios remains a challenging task in autonomous driving. However, most anomaly detection approaches cannot be trained on raw sensor data but require exposure to outlier data and powerful semantic segmentation models trained in a supervised fashion. This limits the representation of normality to labeled data, which does not scale well. In this work, we revisit unsupervised anomaly detection and present UMAD, leveraging generative world models and unsupervised image segmentation. Our method outperforms state-of-the-art unsupervised anomaly detection.
* Daniel Bogdoll and No\"el Ollick contributed equally
Via