 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScene-Extrapolation: Generating Interactive Traffic Scenarios
Paper and Code
Apr 26, 2024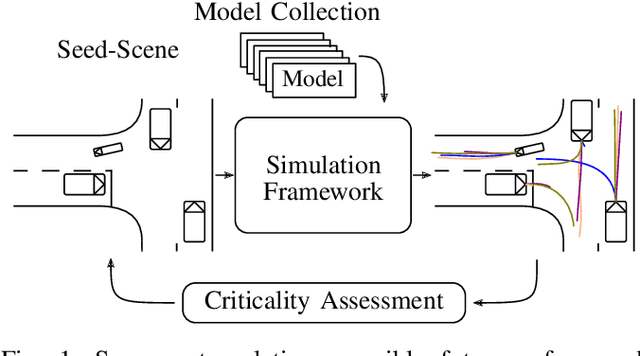
Verifying highly automated driving functions can be challenging, requiring identifying relevant test scenarios. Scenario-based testing will likely play a significant role in verifying these systems, predominantly occurring within simulation. In our approach, we use traffic scenes as a starting point (seed-scene) to address the individuality of various highly automated driving functions and to avoid the problems associated with a predefined test traffic scenario. Different highly autonomous driving functions, or their distinct iterations, may display different behaviors under the same operating conditions. To make a generalizable statement about a seed-scene, we simulate possible outcomes based on various behavior profiles. We utilize our lightweight simulation environment and populate it with rule-based and machine learning behavior models for individual actors in the scenario. We analyze resulting scenarios using a variety of criticality metrics. The density distributions of the resulting criticality values enable us to make a profound statement about the significance of a particular scene, considering various eventualities.