 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSLAM-Based Navigation and Fault Resilience in a Surveillance Quadcopter with Embedded Vision Systems
Apr 18, 2025We present an autonomous aerial surveillance platform, Veg, designed as a fault-tolerant quadcopter system that integrates visual SLAM for GPS-independent navigation, advanced control architecture for dynamic stability, and embedded vision modules for real-time object and face recognition. The platform features a cascaded control design with an LQR inner-loop and PD outer-loop trajectory control. It leverages ORB-SLAM3 for 6-DoF localization and loop closure, and supports waypoint-based navigation through Dijkstra path planning over SLAM-derived maps. A real-time Failure Detection and Identification (FDI) system detects rotor faults and executes emergency landing through re-routing. The embedded vision system, based on a lightweight CNN and PCA, enables onboard object detection and face recognition with high precision. The drone operates fully onboard using a Raspberry Pi 4 and Arduino Nano, validated through simulations and real-world testing. This work consolidates real-time localization, fault recovery, and embedded AI on a single platform suitable for constrained environments.
Sparsity assisted solution to the twin image problem in phase retrieval
Jul 13, 2015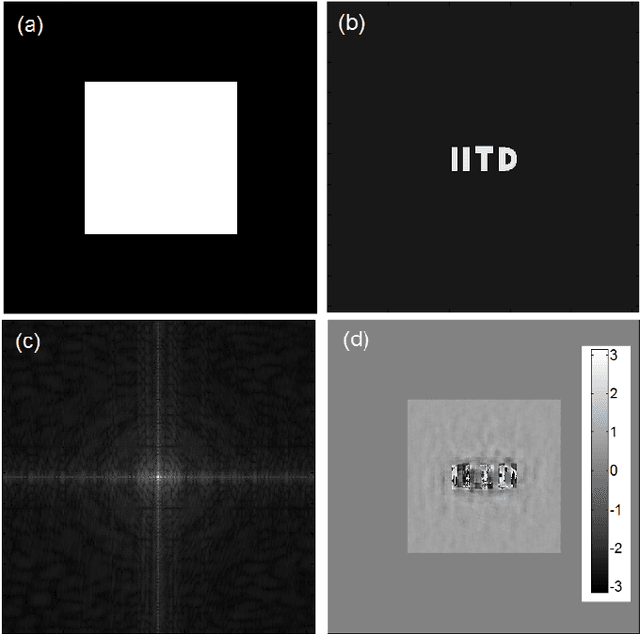


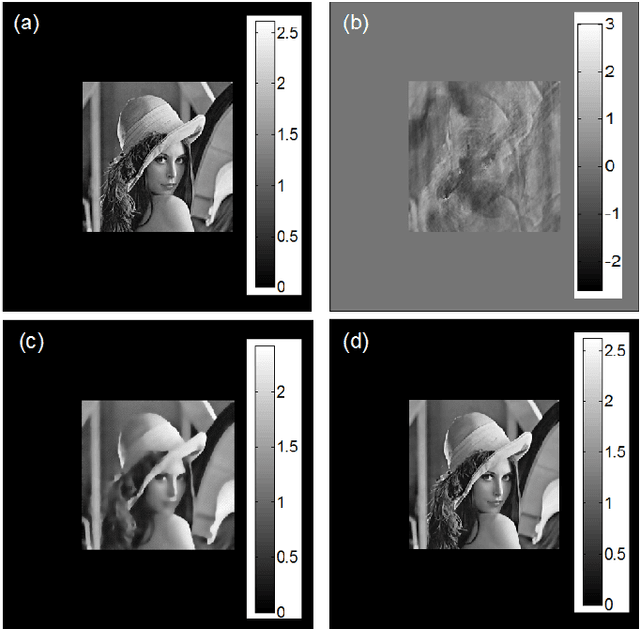
The iterative phase retrieval problem for complex-valued objects from Fourier transform magnitude data is known to suffer from the twin image problem. In particular, when the object support is centro-symmetric, the iterative solution often stagnates such that the resultant complex image contains the features of both the desired solution and its inverted and complex-conjugated replica. The conventional approach to address the twin image problem is to modify the object support during initial iterations which can possibly lead to elimination of one of the twin images. However, at present there seems to be no deterministic procedure to make sure that the twin image will always be very weak or absent. In this work we make an important observation that the ideal solution without the twin image is typically more sparse (in some suitable transform domain) as compared to the stagnated solution containing the twin image. We further show that introducing a sparsity enhancing step in the iterative algorithm can address the twin image problem without the need to change the object support throughout the iterative process even when the object support is centro-symmetric. In a simulation study, we use binary and gray-scale pure phase objects and illustrate the effectiveness of the sparsity assisted phase recovery in the context of the twin image problem. The results have important implications for a wide range of topics in Physics where the phase retrieval problem plays a central role.