 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDART-ing Through the Drift: Dynamic Tracing of Knowledge Neurons for Adaptive Inference-Time Pruning
Jan 30, 2026Large Language Models (LLMs) exhibit substantial parameter redundancy, particularly in Feed-Forward Networks (FFNs). Existing pruning methods suffer from two primary limitations. First, reliance on dataset-specific calibration introduces significant data dependency and computational overhead. Second, being predominantly static, they fail to account for the evolving subset of knowledge neurons in LLMs during autoregressive generation as the context evolves. To address this, we introduce DART, i.e., Dynamic Attention-Guided Runtime Tracing), a lightweight, training-free method that performs on-the-fly context-based pruning. DART monitors shifts in attention score distributions to infer context changes, dynamically updating neuron-level masks to retain salient parameters. Across ten benchmarks, DART outperforms prior dynamic baseline, achieving accuracy gains of up to 14.5% on LLAMA-3.1-8B at 70% FFN sparsity. Furthermore, DART achieves up to 3x better ROUGE-L scores with respect to static-masked pruning on summarization tasks, with its performance comparable to the original dense models. We conclusively demonstrate that the proposed framework effectively adapts to diverse semantic contexts, preserves model capabilities across both general and domain-specific tasks while running at less than 10MBs of memory for LLAMA-3.1-8B(16GBs) with 0.1% FLOPs overhead. The code is available at https://github.com/seeder-research/DART.
Dynamic Sparse Training of Diagonally Sparse Networks
Jun 13, 2025Recent advances in Dynamic Sparse Training (DST) have pushed the frontier of sparse neural network training in structured and unstructured contexts, matching dense-model performance while drastically reducing parameter counts to facilitate model scaling. However, unstructured sparsity often fails to translate into practical speedups on modern hardware. To address this shortcoming, we propose DynaDiag, a novel structured sparse-to-sparse DST method that performs at par with unstructured sparsity. DynaDiag enforces a diagonal sparsity pattern throughout training and preserves sparse computation in forward and backward passes. We further leverage the diagonal structure to accelerate computation via a custom CUDA kernel, rendering the method hardware-friendly. Empirical evaluations on diverse neural architectures demonstrate that our method maintains accuracy on par with unstructured counterparts while benefiting from tangible computational gains. Notably, with 90% sparse linear layers in ViTs, we observe up to a 3.13x speedup in online inference without sacrificing model performance and a 1.59x speedup in training on a GPU compared to equivalent unstructured layers. Our source code is available at https://github.com/horizon-research/DynaDiag/.
Evidence-Grounded Multimodal Misinformation Detection with Attention-Based GNNs
May 23, 2025Multimodal out-of-context (OOC) misinformation is misinformation that repurposes real images with unrelated or misleading captions. Detecting such misinformation is challenging because it requires resolving the context of the claim before checking for misinformation. Many current methods, including LLMs and LVLMs, do not perform this contextualization step. LLMs hallucinate in absence of context or parametric knowledge. In this work, we propose a graph-based method that evaluates the consistency between the image and the caption by constructing two graph representations: an evidence graph, derived from online textual evidence, and a claim graph, from the claim in the caption. Using graph neural networks (GNNs) to encode and compare these representations, our framework then evaluates the truthfulness of image-caption pairs. We create datasets for our graph-based method, evaluate and compare our baseline model against popular LLMs on the misinformation detection task. Our method scores $93.05\%$ detection accuracy on the evaluation set and outperforms the second-best performing method (an LLM) by $2.82\%$, making a case for smaller and task-specific methods.
SLAM-Based Navigation and Fault Resilience in a Surveillance Quadcopter with Embedded Vision Systems
Apr 18, 2025We present an autonomous aerial surveillance platform, Veg, designed as a fault-tolerant quadcopter system that integrates visual SLAM for GPS-independent navigation, advanced control architecture for dynamic stability, and embedded vision modules for real-time object and face recognition. The platform features a cascaded control design with an LQR inner-loop and PD outer-loop trajectory control. It leverages ORB-SLAM3 for 6-DoF localization and loop closure, and supports waypoint-based navigation through Dijkstra path planning over SLAM-derived maps. A real-time Failure Detection and Identification (FDI) system detects rotor faults and executes emergency landing through re-routing. The embedded vision system, based on a lightweight CNN and PCA, enables onboard object detection and face recognition with high precision. The drone operates fully onboard using a Raspberry Pi 4 and Arduino Nano, validated through simulations and real-world testing. This work consolidates real-time localization, fault recovery, and embedded AI on a single platform suitable for constrained environments.
Characterizing Soft-Error Resiliency in Arm's Ethos-U55 Embedded Machine Learning Accelerator
Apr 14, 2024



As Neural Processing Units (NPU) or accelerators are increasingly deployed in a variety of applications including safety critical applications such as autonomous vehicle, and medical imaging, it is critical to understand the fault-tolerance nature of the NPUs. We present a reliability study of Arm's Ethos-U55, an important industrial-scale NPU being utilised in embedded and IoT applications. We perform large scale RTL-level fault injections to characterize Ethos-U55 against the Automotive Safety Integrity Level D (ASIL-D) resiliency standard commonly used for safety-critical applications such as autonomous vehicles. We show that, under soft errors, all four configurations of the NPU fall short of the required level of resiliency for a variety of neural networks running on the NPU. We show that it is possible to meet the ASIL-D level resiliency without resorting to conventional strategies like Dual Core Lock Step (DCLS) that has an area overhead of 100%. We achieve so through selective protection, where hardware structures are selectively protected (e.g., duplicated, hardened) based on their sensitivity to soft errors and their silicon areas. To identify the optimal configuration that minimizes the area overhead while meeting the ASIL-D standard, the main challenge is the large search space associated with the time-consuming RTL simulation. To address this challenge, we present a statistical analysis tool that is validated against Arm silicon and that allows us to quickly navigate hundreds of billions of fault sites without exhaustive RTL fault injections. We show that by carefully duplicating a small fraction of the functional blocks and hardening the Flops in other blocks meets the ASIL-D safety standard while introducing an area overhead of only 38%.
Automated Real Time Delineation of Supraclavicular Brachial Plexus in Neck Ultrasonography Videos: A Deep Learning Approach
Aug 07, 2023Peripheral nerve blocks are crucial to treatment of post-surgical pain and are associated with reduction in perioperative opioid use and hospital stay. Accurate interpretation of sono-anatomy is critical for the success of ultrasound (US) guided peripheral nerve blocks and can be challenging to the new operators. This prospective study enrolled 227 subjects who were systematically scanned for supraclavicular and interscalene brachial plexus in various settings using three different US machines to create a dataset of 227 unique videos. In total, 41,000 video frames were annotated by experienced anaesthesiologists using partial automation with object tracking and active contour algorithms. Four baseline neural network models were trained on the dataset and their performance was evaluated for object detection and segmentation tasks. Generalizability of the best suited model was then tested on the datasets constructed from separate US scanners with and without fine-tuning. The results demonstrate that deep learning models can be leveraged for real time segmentation of supraclavicular brachial plexus in neck ultrasonography videos with high accuracy and reliability. Model was also tested for its ability to differentiate between supraclavicular and adjoining interscalene brachial plexus. The entire dataset has been released publicly for further study by the research community.
Thales: Formulating and Estimating Architectural Vulnerability Factors for DNN Accelerators
Dec 05, 2022



As Deep Neural Networks (DNNs) are increasingly deployed in safety critical and privacy sensitive applications such as autonomous driving and biometric authentication, it is critical to understand the fault-tolerance nature of DNNs. Prior work primarily focuses on metrics such as Failures In Time (FIT) rate and the Silent Data Corruption (SDC) rate, which quantify how often a device fails. Instead, this paper focuses on quantifying the DNN accuracy given that a transient error has occurred, which tells us how well a network behaves when a transient error occurs. We call this metric Resiliency Accuracy (RA). We show that existing RA formulation is fundamentally inaccurate, because it incorrectly assumes that software variables (model weights/activations) have equal faulty probability under hardware transient faults. We present an algorithm that captures the faulty probabilities of DNN variables under transient faults and, thus, provides correct RA estimations validated by hardware. To accelerate RA estimation, we reformulate RA calculation as a Monte Carlo integration problem, and solve it using importance sampling driven by DNN specific heuristics. Using our lightweight RA estimation method, we show that transient faults lead to far greater accuracy degradation than what todays DNN resiliency tools estimate. We show how our RA estimation tool can help design more resilient DNNs by integrating it with a Network Architecture Search framework.
DVIO: Depth aided visual inertial odometry for RGBD sensors
Oct 20, 2021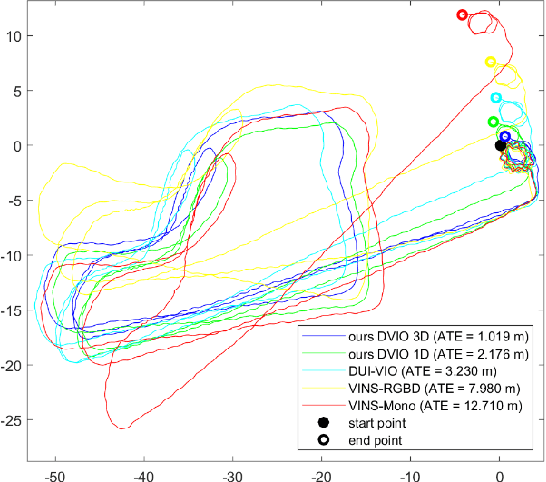
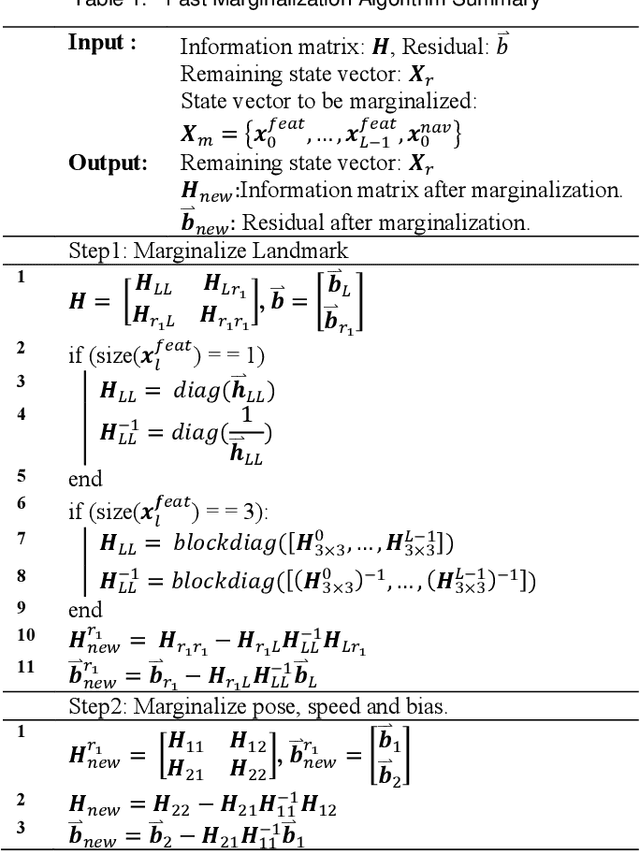
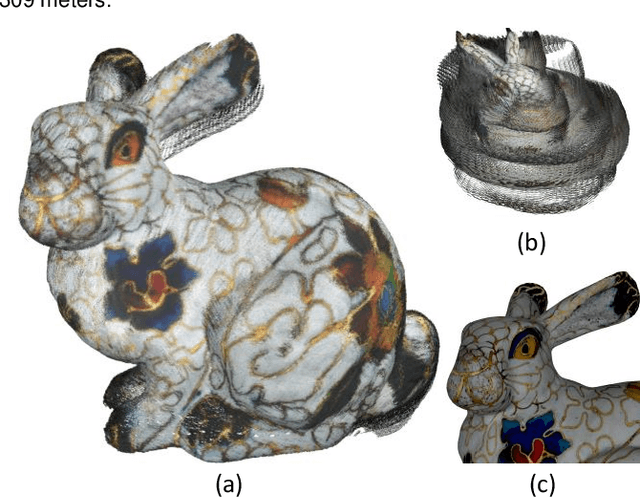
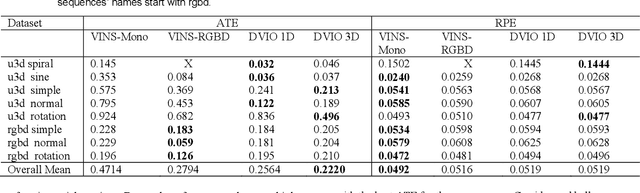
In past few years we have observed an increase in the usage of RGBD sensors in mobile devices. These sensors provide a good estimate of the depth map for the camera frame, which can be used in numerous augmented reality applications. This paper presents a new visual inertial odometry (VIO) system, which uses measurements from a RGBD sensor and an inertial measurement unit (IMU) sensor for estimating the motion state of the mobile device. The resulting system is called the depth-aided VIO (DVIO) system. In this system we add the depth measurement as part of the nonlinear optimization process. Specifically, we propose methods to use the depth measurement using one-dimensional (1D) feature parameterization as well as three-dimensional (3D) feature parameterization. In addition, we propose to utilize the depth measurement for estimating time offset between the unsynchronized IMU and the RGBD sensors. Last but not least, we propose a novel block-based marginalization approach to speed up the marginalization processes and maintain the real-time performance of the overall system. Experimental results validate that the proposed DVIO system outperforms the other state-of-the-art VIO systems in terms of trajectory accuracy as well as processing time.