 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Sparse Training of Diagonally Sparse Networks
Jun 13, 2025Recent advances in Dynamic Sparse Training (DST) have pushed the frontier of sparse neural network training in structured and unstructured contexts, matching dense-model performance while drastically reducing parameter counts to facilitate model scaling. However, unstructured sparsity often fails to translate into practical speedups on modern hardware. To address this shortcoming, we propose DynaDiag, a novel structured sparse-to-sparse DST method that performs at par with unstructured sparsity. DynaDiag enforces a diagonal sparsity pattern throughout training and preserves sparse computation in forward and backward passes. We further leverage the diagonal structure to accelerate computation via a custom CUDA kernel, rendering the method hardware-friendly. Empirical evaluations on diverse neural architectures demonstrate that our method maintains accuracy on par with unstructured counterparts while benefiting from tangible computational gains. Notably, with 90% sparse linear layers in ViTs, we observe up to a 3.13x speedup in online inference without sacrificing model performance and a 1.59x speedup in training on a GPU compared to equivalent unstructured layers. Our source code is available at https://github.com/horizon-research/DynaDiag/.
SnapPix: Efficient-Coding--Inspired In-Sensor Compression for Edge Vision
Apr 06, 2025Energy-efficient image acquisition on the edge is crucial for enabling remote sensing applications where the sensor node has weak compute capabilities and must transmit data to a remote server/cloud for processing. To reduce the edge energy consumption, this paper proposes a sensor-algorithm co-designed system called SnapPix, which compresses raw pixels in the analog domain inside the sensor. We use coded exposure (CE) as the in-sensor compression strategy as it offers the flexibility to sample, i.e., selectively expose pixels, both spatially and temporally. SNAPPIX has three contributions. First, we propose a task-agnostic strategy to learn the sampling/exposure pattern based on the classic theory of efficient coding. Second, we co-design the downstream vision model with the exposure pattern to address the pixel-level non-uniformity unique to CE-compressed images. Finally, we propose lightweight augmentations to the image sensor hardware to support our in-sensor CE compression. Evaluating on action recognition and video reconstruction, SnapPix outperforms state-of-the-art video-based methods at the same speed while reducing the energy by up to 15.4x. We have open-sourced the code at: https://github.com/horizon-research/SnapPix.
VAP: The Vulnerability-Adaptive Protection Paradigm Toward Reliable Autonomous Machines
Sep 30, 2024



The next ubiquitous computing platform, following personal computers and smartphones, is poised to be inherently autonomous, encompassing technologies like drones, robots, and self-driving cars. Ensuring reliability for these autonomous machines is critical. However, current resiliency solutions make fundamental trade-offs between reliability and cost, resulting in significant overhead in performance, energy consumption, and chip area. This is due to the "one-size-fits-all" approach commonly used, where the same protection scheme is applied throughout the entire software computing stack. This paper presents the key insight that to achieve high protection coverage with minimal cost, we must leverage the inherent variations in robustness across different layers of the autonomous machine software stack. Specifically, we demonstrate that various nodes in this complex stack exhibit different levels of robustness against hardware faults. Our findings reveal that the front-end of an autonomous machine's software stack tends to be more robust, whereas the back-end is generally more vulnerable. Building on these inherent robustness differences, we propose a Vulnerability-Adaptive Protection (VAP) design paradigm. In this paradigm, the allocation of protection resources - whether spatially (e.g., through modular redundancy) or temporally (e.g., via re-execution) - is made inversely proportional to the inherent robustness of tasks or algorithms within the autonomous machine system. Experimental results show that VAP provides high protection coverage while maintaining low overhead in both autonomous vehicle and drone systems.
Computational Trichromacy Reconstruction: Empowering the Color-Vision Deficient to Recognize Colors Using Augmented Reality
Aug 04, 2024We propose an assistive technology that helps individuals with Color Vision Deficiencies (CVD) to recognize/name colors. A dichromat's color perception is a reduced two-dimensional (2D) subset of a normal trichromat's three dimensional color (3D) perception, leading to confusion when visual stimuli that appear identical to the dichromat are referred to by different color names. Using our proposed system, CVD individuals can interactively induce distinct perceptual changes to originally confusing colors via a computational color space transformation. By combining their original 2D precepts for colors with the discriminative changes, a three dimensional color space is reconstructed, where the dichromat can learn to resolve color name confusions and accurately recognize colors. Our system is implemented as an Augmented Reality (AR) interface on smartphones, where users interactively control the rotation through swipe gestures and observe the induced color shifts in the camera view or in a displayed image. Through psychophysical experiments and a longitudinal user study, we demonstrate that such rotational color shifts have discriminative power (initially confusing colors become distinct under rotation) and exhibit structured perceptual shifts dichromats can learn with modest training. The AR App is also evaluated in two real-world scenarios (building with lego blocks and interpreting artistic works); users all report positive experience in using the App to recognize object colors that they otherwise could not.
Artificial Immune System of Secure Face Recognition Against Adversarial Attacks
Jun 26, 2024Insect production for food and feed presents a promising supplement to ensure food safety and address the adverse impacts of agriculture on climate and environment in the future. However, optimisation is required for insect production to realise its full potential. This can be by targeted improvement of traits of interest through selective breeding, an approach which has so far been underexplored and underutilised in insect farming. Here we present a comprehensive review of the selective breeding framework in the context of insect production. We systematically evaluate adjustments of selective breeding techniques to the realm of insects and highlight the essential components integral to the breeding process. The discussion covers every step of a conventional breeding scheme, such as formulation of breeding objectives, phenotyping, estimation of genetic parameters and breeding values, selection of appropriate breeding strategies, and mitigation of issues associated with genetic diversity depletion and inbreeding. This review combines knowledge from diverse disciplines, bridging the gap between animal breeding, quantitative genetics, evolutionary biology, and entomology, offering an integrated view of the insect breeding research area and uniting knowledge which has previously remained scattered across diverse fields of expertise.
Characterizing Soft-Error Resiliency in Arm's Ethos-U55 Embedded Machine Learning Accelerator
Apr 14, 2024



As Neural Processing Units (NPU) or accelerators are increasingly deployed in a variety of applications including safety critical applications such as autonomous vehicle, and medical imaging, it is critical to understand the fault-tolerance nature of the NPUs. We present a reliability study of Arm's Ethos-U55, an important industrial-scale NPU being utilised in embedded and IoT applications. We perform large scale RTL-level fault injections to characterize Ethos-U55 against the Automotive Safety Integrity Level D (ASIL-D) resiliency standard commonly used for safety-critical applications such as autonomous vehicles. We show that, under soft errors, all four configurations of the NPU fall short of the required level of resiliency for a variety of neural networks running on the NPU. We show that it is possible to meet the ASIL-D level resiliency without resorting to conventional strategies like Dual Core Lock Step (DCLS) that has an area overhead of 100%. We achieve so through selective protection, where hardware structures are selectively protected (e.g., duplicated, hardened) based on their sensitivity to soft errors and their silicon areas. To identify the optimal configuration that minimizes the area overhead while meeting the ASIL-D standard, the main challenge is the large search space associated with the time-consuming RTL simulation. To address this challenge, we present a statistical analysis tool that is validated against Arm silicon and that allows us to quickly navigate hundreds of billions of fault sites without exhaustive RTL fault injections. We show that by carefully duplicating a small fraction of the functional blocks and hardening the Flops in other blocks meets the ASIL-D safety standard while introducing an area overhead of only 38%.
Multiscale Dynamic Graph Representation for Biometric Recognition with Occlusions
Jul 27, 2023



Occlusion is a common problem with biometric recognition in the wild. The generalization ability of CNNs greatly decreases due to the adverse effects of various occlusions. To this end, we propose a novel unified framework integrating the merits of both CNNs and graph models to overcome occlusion problems in biometric recognition, called multiscale dynamic graph representation (MS-DGR). More specifically, a group of deep features reflected on certain subregions is recrafted into a feature graph (FG). Each node inside the FG is deemed to characterize a specific local region of the input sample, and the edges imply the co-occurrence of non-occluded regions. By analyzing the similarities of the node representations and measuring the topological structures stored in the adjacent matrix, the proposed framework leverages dynamic graph matching to judiciously discard the nodes corresponding to the occluded parts. The multiscale strategy is further incorporated to attain more diverse nodes representing regions of various sizes. Furthermore, the proposed framework exhibits a more illustrative and reasonable inference by showing the paired nodes. Extensive experiments demonstrate the superiority of the proposed framework, which boosts the accuracy in both natural and occlusion-simulated cases by a large margin compared with that of baseline methods.
Autonomy 2.0: The Quest for Economies of Scale
Jul 08, 2023



With the advancement of robotics and AI technologies in the past decade, we have now entered the age of autonomous machines. In this new age of information technology, autonomous machines, such as service robots, autonomous drones, delivery robots, and autonomous vehicles, rather than humans, will provide services. In this article, through examining the technical challenges and economic impact of the digital economy, we argue that scalability is both highly necessary from a technical perspective and significantly advantageous from an economic perspective, thus is the key for the autonomy industry to achieve its full potential. Nonetheless, the current development paradigm, dubbed Autonomy 1.0, scales with the number of engineers, instead of with the amount of data or compute resources, hence preventing the autonomy industry to fully benefit from the economies of scale, especially the exponentially cheapening compute cost and the explosion of available data. We further analyze the key scalability blockers and explain how a new development paradigm, dubbed Autonomy 2.0, can address these problems to greatly boost the autonomy industry.
Thales: Formulating and Estimating Architectural Vulnerability Factors for DNN Accelerators
Dec 05, 2022



As Deep Neural Networks (DNNs) are increasingly deployed in safety critical and privacy sensitive applications such as autonomous driving and biometric authentication, it is critical to understand the fault-tolerance nature of DNNs. Prior work primarily focuses on metrics such as Failures In Time (FIT) rate and the Silent Data Corruption (SDC) rate, which quantify how often a device fails. Instead, this paper focuses on quantifying the DNN accuracy given that a transient error has occurred, which tells us how well a network behaves when a transient error occurs. We call this metric Resiliency Accuracy (RA). We show that existing RA formulation is fundamentally inaccurate, because it incorrectly assumes that software variables (model weights/activations) have equal faulty probability under hardware transient faults. We present an algorithm that captures the faulty probabilities of DNN variables under transient faults and, thus, provides correct RA estimations validated by hardware. To accelerate RA estimation, we reformulate RA calculation as a Monte Carlo integration problem, and solve it using importance sampling driven by DNN specific heuristics. Using our lightweight RA estimation method, we show that transient faults lead to far greater accuracy degradation than what todays DNN resiliency tools estimate. We show how our RA estimation tool can help design more resilient DNNs by integrating it with a Network Architecture Search framework.
Factor Graph Accelerator for LiDAR-Inertial Odometry
Sep 06, 2022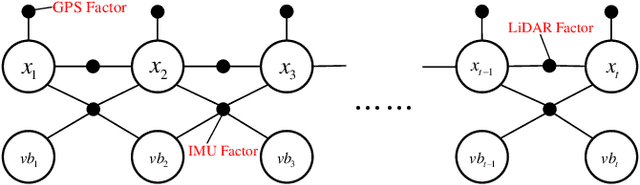
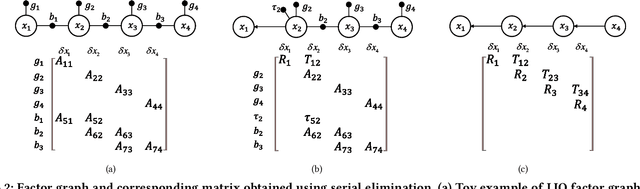
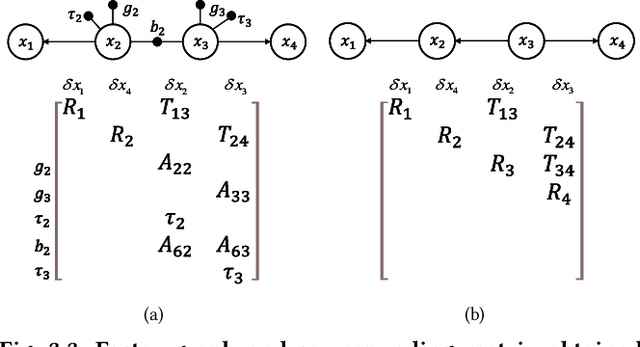

Factor graph is a graph representing the factorization of a probability distribution function, and has been utilized in many autonomous machine computing tasks, such as localization, tracking, planning and control etc. We are developing an architecture with the goal of using factor graph as a common abstraction for most, if not, all autonomous machine computing tasks. If successful, the architecture would provide a very simple interface of mapping autonomous machine functions to the underlying compute hardware. As a first step of such an attempt, this paper presents our most recent work of developing a factor graph accelerator for LiDAR-Inertial Odometry (LIO), an essential task in many autonomous machines, such as autonomous vehicles and mobile robots. By modeling LIO as a factor graph, the proposed accelerator not only supports multi-sensor fusion such as LiDAR, inertial measurement unit (IMU), GPS, etc., but solves the global optimization problem of robot navigation in batch or incremental modes. Our evaluation demonstrates that the proposed design significantly improves the real-time performance and energy efficiency of autonomous machine navigation systems. The initial success suggests the potential of generalizing the factor graph architecture as a common abstraction for autonomous machine computing, including tracking, planning, and control etc.