 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCorki: Enabling Real-time Embodied AI Robots via Algorithm-Architecture Co-Design
Jul 05, 2024



Embodied AI robots have the potential to fundamentally improve the way human beings live and manufacture. Continued progress in the burgeoning field of using large language models to control robots depends critically on an efficient computing substrate. In particular, today's computing systems for embodied AI robots are designed purely based on the interest of algorithm developers, where robot actions are divided into a discrete frame-basis. Such an execution pipeline creates high latency and energy consumption. This paper proposes Corki, an algorithm-architecture co-design framework for real-time embodied AI robot control. Our idea is to decouple LLM inference, robotic control and data communication in the embodied AI robots compute pipeline. Instead of predicting action for one single frame, Corki predicts the trajectory for the near future to reduce the frequency of LLM inference. The algorithm is coupled with a hardware that accelerates transforming trajectory into actual torque signals used to control robots and an execution pipeline that parallels data communication with computation. Corki largely reduces LLM inference frequency by up to 8.0x, resulting in up to 3.6x speed up. The success rate improvement can be up to 17.3%. Code is provided for re-implementation. https://github.com/hyy0613/Corki
Factor Graph Accelerator for LiDAR-Inertial Odometry
Sep 06, 2022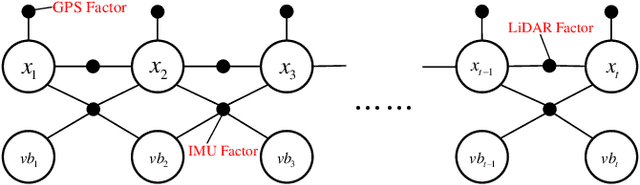
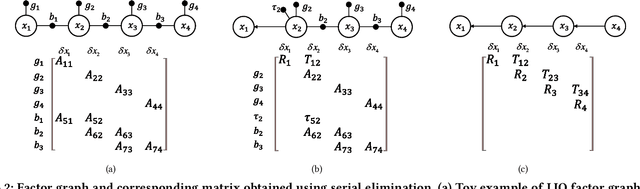
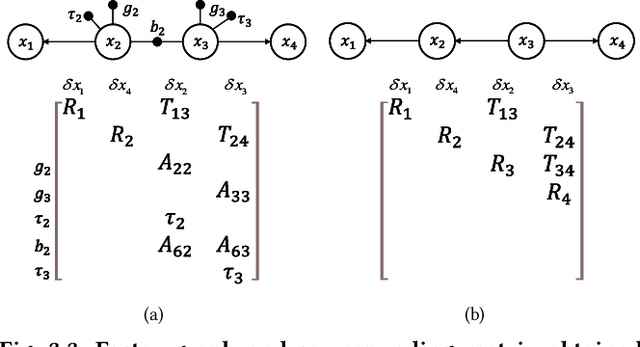

Factor graph is a graph representing the factorization of a probability distribution function, and has been utilized in many autonomous machine computing tasks, such as localization, tracking, planning and control etc. We are developing an architecture with the goal of using factor graph as a common abstraction for most, if not, all autonomous machine computing tasks. If successful, the architecture would provide a very simple interface of mapping autonomous machine functions to the underlying compute hardware. As a first step of such an attempt, this paper presents our most recent work of developing a factor graph accelerator for LiDAR-Inertial Odometry (LIO), an essential task in many autonomous machines, such as autonomous vehicles and mobile robots. By modeling LIO as a factor graph, the proposed accelerator not only supports multi-sensor fusion such as LiDAR, inertial measurement unit (IMU), GPS, etc., but solves the global optimization problem of robot navigation in batch or incremental modes. Our evaluation demonstrates that the proposed design significantly improves the real-time performance and energy efficiency of autonomous machine navigation systems. The initial success suggests the potential of generalizing the factor graph architecture as a common abstraction for autonomous machine computing, including tracking, planning, and control etc.