 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStateLinFormer: Stateful Training Enhancing Long-term Memory in Navigation
Mar 24, 2026Effective navigation intelligence relies on long-term memory to support both immediate generalization and sustained adaptation. However, existing approaches face a dilemma: modular systems rely on explicit mapping but lack flexibility, while Transformer-based end-to-end models are constrained by fixed context windows, limiting persistent memory across extended interactions. We introduce StateLinFormer, a linear-attention navigation model trained with a stateful memory mechanism that preserves recurrent memory states across consecutive training segments instead of reinitializing them at each batch boundary. This training paradigm effectively approximates learning on infinitely long sequences, enabling the model to achieve long-horizon memory retention. Experiments across both MAZE and ProcTHOR environments demonstrate that StateLinFormer significantly outperforms its stateless linear-attention counterpart and standard Transformer baselines with fixed context windows. Notably, as interaction length increases, persistent stateful training substantially improves context-dependent adaptation, suggesting an enhancement in the model's In-Context Learning (ICL) capabilities for navigation tasks.
KEEP: A KV-Cache-Centric Memory Management System for Efficient Embodied Planning
Feb 27, 2026Memory-augmented Large Language Models (LLMs) have demonstrated remarkable capability for complex and long-horizon embodied planning. By keeping track of past experiences and environmental states, memory enables LLMs to maintain a global view, thereby avoiding repetitive exploration. However, existing approaches often store the memory as raw text, leading to excessively long prompts and high prefill latency. While it is possible to store and reuse the KV caches, the efficiency benefits are greatly undermined due to frequent KV cache updates. In this paper, we propose KEEP, a KV-cache-centric memory management system for efficient embodied planning. KEEP features 3 key innovations: (1) a Static-Dynamic Memory Construction algorithm that reduces KV cache recomputation by mixed-granularity memory group; (2) a Multi-hop Memory Re-computation algorithm that dynamically identifies important cross-attention among different memory groups and reconstructs memory interactions iteratively; (3) a Layer-balanced Memory Loading that eliminates unbalanced KV cache loading and cross-attention computation across different layers. Extensive experimental results have demonstrated that KEEP achieves 2.68x speedup with negligible accuracy loss compared with text-based memory methods on ALFRED dataset. Compared with the KV re-computation method CacheBlend (EuroSys'25), KEEP shows 4.13% success rate improvement and 1.90x time-to-first-token (TTFT) reduction. Our code is available on https://github.com/PKU-SEC-Lab/KEEP_Embodied_Memory.
DySL-VLA: Efficient Vision-Language-Action Model Inference via Dynamic-Static Layer-Skipping for Robot Manipulation
Feb 26, 2026Vision-Language-Action (VLA) models have shown remarkable success in robotic tasks like manipulation by fusing a language model's reasoning with a vision model's 3D understanding. However, their high computational cost remains a major obstacle for real-world applications that require real-time performance. We observe that the actions within a task have varying levels of importance: critical steps demand high precision, while less important ones can tolerate more variance. Leveraging this insight, we propose DySL-VLA, a novel framework that addresses computational cost by dynamically skipping VLA layers based on each action's importance. DySL-VLA categorizes its layers into two types: informative layers, which are consistently executed, and incremental layers, which can be selectively skipped. To intelligently skip layers without sacrificing accuracy, we invent a prior-post skipping guidance mechanism to determine when to initiate layer-skipping. We also propose a skip-aware two-stage knowledge distillation algorithm to efficiently train a standard VLA into a DySL-VLA. Our experiments indicate that DySL-VLA achieves 2.1% improvement in success length over Deer-VLA on the Calvin dataset, while simultaneously reducing trainable parameters by a factor of 85.7 and providing a 3.75x speedup relative to the RoboFlamingo baseline at iso-accuracy. Our code is available on https://github.com/PKU-SEC-Lab/DYSL_VLA.
Context and Diversity Matter: The Emergence of In-Context Learning in World Models
Sep 26, 2025The capability of predicting environmental dynamics underpins both biological neural systems and general embodied AI in adapting to their surroundings. Yet prevailing approaches rest on static world models that falter when confronted with novel or rare configurations. We investigate in-context environment learning (ICEL), shifting attention from zero-shot performance to the growth and asymptotic limits of the world model. Our contributions are three-fold: (1) we formalize in-context learning of a world model and identify two core mechanisms: environment recognition and environment learning; (2) we derive error upper-bounds for both mechanisms that expose how the mechanisms emerge; and (3) we empirically confirm that distinct ICL mechanisms exist in the world model, and we further investigate how data distribution and model architecture affect ICL in a manner consistent with theory. These findings demonstrate the potential of self-adapting world models and highlight the key factors behind the emergence of ICEL, most notably the necessity of long context and diverse environments.
Conceptual Framework Toward Embodied Collective Adaptive Intelligence
May 29, 2025

Collective Adaptive Intelligence (CAI) represent a transformative approach in artificial intelligence, wherein numerous autonomous agents collaborate, adapt, and self-organize to navigate complex, dynamic environments. This paradigm is particularly impactful in embodied AI applications, where adaptability and resilience are paramount. By enabling systems to reconfigure themselves in response to unforeseen challenges, CAI facilitate robust performance in real-world scenarios. This article introduces a conceptual framework for designing and analyzing CAI. It delineates key attributes including task generalization, resilience, scalability, and self-assembly, aiming to bridge theoretical foundations with practical methodologies for engineering adaptive, emergent intelligence. By providing a structured foundation for understanding and implementing CAI, this work seeks to guide researchers and practitioners in developing more resilient, scalable, and adaptable AI systems across various domains.
ADDT -- A Digital Twin Framework for Proactive Safety Validation in Autonomous Driving Systems
Apr 13, 2025Autonomous driving systems continue to face safety-critical failures, often triggered by rare and unpredictable corner cases that evade conventional testing. We present the Autonomous Driving Digital Twin (ADDT) framework, a high-fidelity simulation platform designed to proactively identify hidden faults, evaluate real-time performance, and validate safety before deployment. ADDT combines realistic digital models of driving environments, vehicle dynamics, sensor behavior, and fault conditions to enable scalable, scenario-rich stress-testing under diverse and adverse conditions. It supports adaptive exploration of edge cases using reinforcement-driven techniques, uncovering failure modes that physical road testing often misses. By shifting from reactive debugging to proactive simulation-driven validation, ADDT enables a more rigorous and transparent approach to autonomous vehicle safety engineering. To accelerate adoption and facilitate industry-wide safety improvements, the entire ADDT framework has been released as open-source software, providing developers with an accessible and extensible tool for comprehensive safety testing at scale.
OmniRL: In-Context Reinforcement Learning by Large-Scale Meta-Training in Randomized Worlds
Feb 05, 2025



We introduce OmniRL, a highly generalizable in-context reinforcement learning (ICRL) model that is meta-trained on hundreds of thousands of diverse tasks. These tasks are procedurally generated by randomizing state transitions and rewards within Markov Decision Processes. To facilitate this extensive meta-training, we propose two key innovations: 1. An efficient data synthesis pipeline for ICRL, which leverages the interaction histories of diverse behavior policies; and 2. A novel modeling framework that integrates both imitation learning and reinforcement learning (RL) within the context, by incorporating prior knowledge. For the first time, we demonstrate that in-context learning (ICL) alone, without any gradient-based fine-tuning, can successfully tackle unseen Gymnasium tasks through imitation learning, online RL, or offline RL. Additionally, we show that achieving generalized ICRL capabilities-unlike task identification-oriented few-shot learning-critically depends on long trajectories generated by variant tasks and diverse behavior policies. By emphasizing the potential of ICL and departing from pre-training focused on acquiring specific skills, we further underscore the significance of meta-training aimed at cultivating the ability of ICL itself.
DaDu-E: Rethinking the Role of Large Language Model in Robotic Computing Pipeline
Dec 02, 2024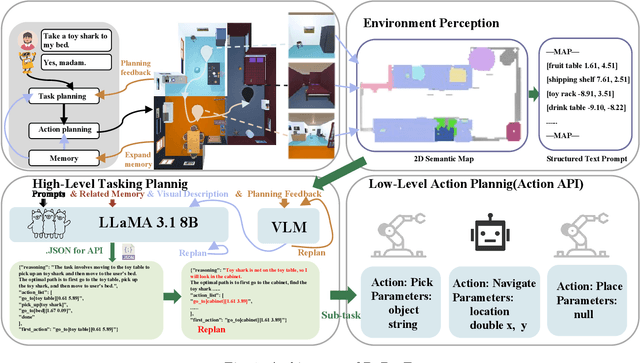

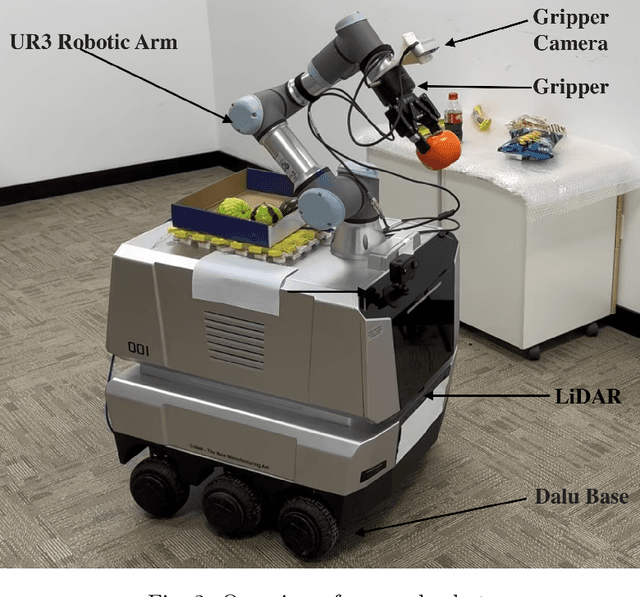
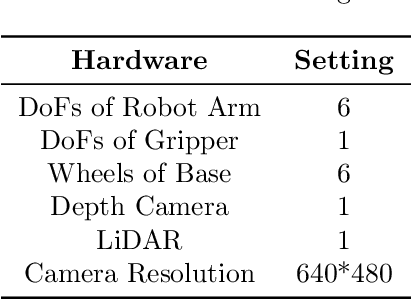
Performing complex tasks in open environments remains challenging for robots, even when using large language models (LLMs) as the core planner. Many LLM-based planners are inefficient due to their large number of parameters and prone to inaccuracies because they operate in open-loop systems. We think the reason is that only applying LLMs as planners is insufficient. In this work, we propose DaDu-E, a robust closed-loop planning framework for embodied AI robots. Specifically, DaDu-E is equipped with a relatively lightweight LLM, a set of encapsulated robot skill instructions, a robust feedback system, and memory augmentation. Together, these components enable DaDu-E to (i) actively perceive and adapt to dynamic environments, (ii) optimize computational costs while maintaining high performance, and (iii) recover from execution failures using its memory and feedback mechanisms. Extensive experiments on real-world and simulated tasks show that DaDu-E achieves task success rates comparable to embodied AI robots with larger models as planners like COME-Robot, while reducing computational requirements by $6.6 \times$. Users are encouraged to explore our system at: \url{https://rlc-lab.github.io/dadu-e/}.
VAP: The Vulnerability-Adaptive Protection Paradigm Toward Reliable Autonomous Machines
Sep 30, 2024



The next ubiquitous computing platform, following personal computers and smartphones, is poised to be inherently autonomous, encompassing technologies like drones, robots, and self-driving cars. Ensuring reliability for these autonomous machines is critical. However, current resiliency solutions make fundamental trade-offs between reliability and cost, resulting in significant overhead in performance, energy consumption, and chip area. This is due to the "one-size-fits-all" approach commonly used, where the same protection scheme is applied throughout the entire software computing stack. This paper presents the key insight that to achieve high protection coverage with minimal cost, we must leverage the inherent variations in robustness across different layers of the autonomous machine software stack. Specifically, we demonstrate that various nodes in this complex stack exhibit different levels of robustness against hardware faults. Our findings reveal that the front-end of an autonomous machine's software stack tends to be more robust, whereas the back-end is generally more vulnerable. Building on these inherent robustness differences, we propose a Vulnerability-Adaptive Protection (VAP) design paradigm. In this paradigm, the allocation of protection resources - whether spatially (e.g., through modular redundancy) or temporally (e.g., via re-execution) - is made inversely proportional to the inherent robustness of tasks or algorithms within the autonomous machine system. Experimental results show that VAP provides high protection coverage while maintaining low overhead in both autonomous vehicle and drone systems.
Corki: Enabling Real-time Embodied AI Robots via Algorithm-Architecture Co-Design
Jul 05, 2024



Embodied AI robots have the potential to fundamentally improve the way human beings live and manufacture. Continued progress in the burgeoning field of using large language models to control robots depends critically on an efficient computing substrate. In particular, today's computing systems for embodied AI robots are designed purely based on the interest of algorithm developers, where robot actions are divided into a discrete frame-basis. Such an execution pipeline creates high latency and energy consumption. This paper proposes Corki, an algorithm-architecture co-design framework for real-time embodied AI robot control. Our idea is to decouple LLM inference, robotic control and data communication in the embodied AI robots compute pipeline. Instead of predicting action for one single frame, Corki predicts the trajectory for the near future to reduce the frequency of LLM inference. The algorithm is coupled with a hardware that accelerates transforming trajectory into actual torque signals used to control robots and an execution pipeline that parallels data communication with computation. Corki largely reduces LLM inference frequency by up to 8.0x, resulting in up to 3.6x speed up. The success rate improvement can be up to 17.3%. Code is provided for re-implementation. https://github.com/hyy0613/Corki