 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenFly: A Versatile Toolchain and Large-scale Benchmark for Aerial Vision-Language Navigation
Feb 25, 2025Vision-Language Navigation (VLN) aims to guide agents through an environment by leveraging both language instructions and visual cues, playing a pivotal role in embodied AI. Indoor VLN has been extensively studied, whereas outdoor aerial VLN remains underexplored. The potential reason is that outdoor aerial view encompasses vast areas, making data collection more challenging, which results in a lack of benchmarks. To address this problem, we propose OpenFly, a platform comprising a versatile toolchain and large-scale benchmark for aerial VLN. Firstly, we develop a highly automated toolchain for data collection, enabling automatic point cloud acquisition, scene semantic segmentation, flight trajectory creation, and instruction generation. Secondly, based on the toolchain, we construct a large-scale aerial VLN dataset with 100k trajectories, covering diverse heights and lengths across 18 scenes. The corresponding visual data are generated using various rendering engines and advanced techniques, including Unreal Engine, GTA V, Google Earth, and 3D Gaussian Splatting (3D GS). All data exhibit high visual quality. Particularly, 3D GS supports real-to-sim rendering, further enhancing the realism of the dataset. Thirdly, we propose OpenFly-Agent, a keyframe-aware VLN model, which takes language instructions, current observations, and historical keyframes as input, and outputs flight actions directly. Extensive analyses and experiments are conducted, showcasing the superiority of our OpenFly platform and OpenFly-Agent. The toolchain, dataset, and codes will be open-sourced.
DaDu-E: Rethinking the Role of Large Language Model in Robotic Computing Pipeline
Dec 02, 2024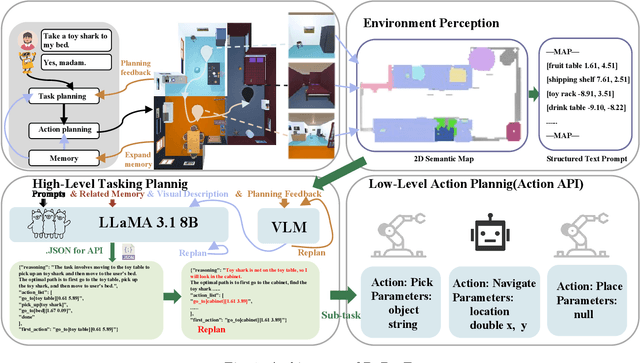

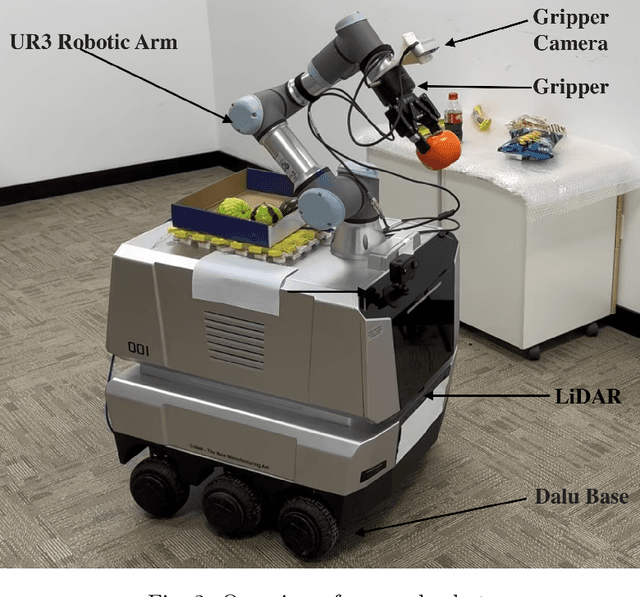
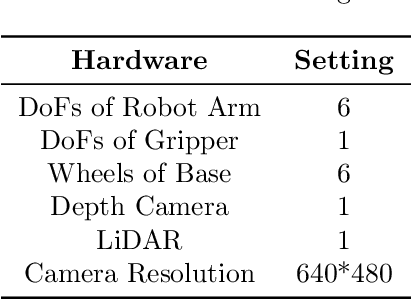
Performing complex tasks in open environments remains challenging for robots, even when using large language models (LLMs) as the core planner. Many LLM-based planners are inefficient due to their large number of parameters and prone to inaccuracies because they operate in open-loop systems. We think the reason is that only applying LLMs as planners is insufficient. In this work, we propose DaDu-E, a robust closed-loop planning framework for embodied AI robots. Specifically, DaDu-E is equipped with a relatively lightweight LLM, a set of encapsulated robot skill instructions, a robust feedback system, and memory augmentation. Together, these components enable DaDu-E to (i) actively perceive and adapt to dynamic environments, (ii) optimize computational costs while maintaining high performance, and (iii) recover from execution failures using its memory and feedback mechanisms. Extensive experiments on real-world and simulated tasks show that DaDu-E achieves task success rates comparable to embodied AI robots with larger models as planners like COME-Robot, while reducing computational requirements by $6.6 \times$. Users are encouraged to explore our system at: \url{https://rlc-lab.github.io/dadu-e/}.
Fast-UMI: A Scalable and Hardware-Independent Universal Manipulation Interface
Sep 29, 2024



Collecting real-world manipulation trajectory data involving robotic arms is essential for developing general-purpose action policies in robotic manipulation, yet such data remains scarce. Existing methods face limitations such as high costs, labor intensity, hardware dependencies, and complex setup requirements involving SLAM algorithms. In this work, we introduce Fast-UMI, an interface-mediated manipulation system comprising two key components: a handheld device operated by humans for data collection and a robot-mounted device used during policy inference. Our approach employs a decoupled design compatible with a wide range of grippers while maintaining consistent observation perspectives, allowing models trained on handheld-collected data to be directly applied to real robots. By directly obtaining the end-effector pose using existing commercial hardware products, we eliminate the need for complex SLAM deployment and calibration, streamlining data processing. Fast-UMI provides supporting software tools for efficient robot learning data collection and conversion, facilitating rapid, plug-and-play functionality. This system offers an efficient and user-friendly tool for robotic learning data acquisition.
Luban: Building Open-Ended Creative Agents via Autonomous Embodied Verification
May 24, 2024Building open agents has always been the ultimate goal in AI research, and creative agents are the more enticing. Existing LLM agents excel at long-horizon tasks with well-defined goals (e.g., `mine diamonds' in Minecraft). However, they encounter difficulties on creative tasks with open goals and abstract criteria due to the inability to bridge the gap between them, thus lacking feedback for self-improvement in solving the task. In this work, we introduce autonomous embodied verification techniques for agents to fill the gap, laying the groundwork for creative tasks. Specifically, we propose the Luban agent target creative building tasks in Minecraft, which equips with two-level autonomous embodied verification inspired by human design practices: (1) visual verification of 3D structural speculates, which comes from agent synthesized CAD modeling programs; (2) pragmatic verification of the creation by generating and verifying environment-relevant functionality programs based on the abstract criteria. Extensive multi-dimensional human studies and Elo ratings show that the Luban completes diverse creative building tasks in our proposed benchmark and outperforms other baselines ($33\%$ to $100\%$) in both visualization and pragmatism. Additional demos on the real-world robotic arm show the creation potential of the Luban in the physical world.
Depth-NeuS: Neural Implicit Surfaces Learning for Multi-view Reconstruction Based on Depth Information Optimization
Mar 30, 2023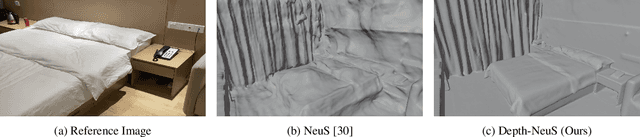
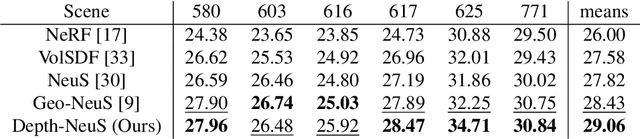


Recently, methods for neural surface representation and rendering, for example NeuS, have shown that learning neural implicit surfaces through volume rendering is becoming increasingly popular and making good progress. However, these methods still face some challenges. Existing methods lack a direct representation of depth information, which makes object reconstruction unrestricted by geometric features, resulting in poor reconstruction of objects with texture and color features. This is because existing methods only use surface normals to represent implicit surfaces without using depth information. Therefore, these methods cannot model the detailed surface features of objects well. To address this problem, we propose a neural implicit surface learning method called Depth-NeuS based on depth information optimization for multi-view reconstruction. In this paper, we introduce depth loss to explicitly constrain SDF regression and introduce geometric consistency loss to optimize for low-texture areas. Specific experiments show that Depth-NeuS outperforms existing technologies in multiple scenarios and achieves high-quality surface reconstruction in multiple scenarios.