 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQiMeng-CodeV-SVA: Training Specialized LLMs for Hardware Assertion Generation via RTL-Grounded Bidirectional Data Synthesis
Mar 15, 2026SystemVerilog Assertions (SVAs) are crucial for hardware verification. Recent studies leverage general-purpose LLMs to translate natural language properties to SVAs (NL2SVA), but they perform poorly due to limited data. We propose a data synthesis framework to tackle two challenges: the scarcity of high-quality real-world SVA corpora and the lack of reliable methods to determine NL-SVA semantic equivalence. For the former, large-scale open-source RTLs are used to guide LLMs to generate real-world SVAs; for the latter, bidirectional translation serves as a data selection method. With the synthesized data, we train CodeV-SVA, a series of SVA generation models. Notably, CodeV-SVA-14B achieves 75.8% on NL2SVA-Human and 84.0% on NL2SVA-Machine in Func.@1, matching or exceeding advanced LLMs like GPT-5 and DeepSeek-R1.
CodeV-R1: Reasoning-Enhanced Verilog Generation
May 30, 2025Large language models (LLMs) trained via reinforcement learning with verifiable reward (RLVR) have achieved breakthroughs on tasks with explicit, automatable verification, such as software programming and mathematical problems. Extending RLVR to electronic design automation (EDA), especially automatically generating hardware description languages (HDLs) like Verilog from natural-language (NL) specifications, however, poses three key challenges: the lack of automated and accurate verification environments, the scarcity of high-quality NL-code pairs, and the prohibitive computation cost of RLVR. To this end, we introduce CodeV-R1, an RLVR framework for training Verilog generation LLMs. First, we develop a rule-based testbench generator that performs robust equivalence checking against golden references. Second, we propose a round-trip data synthesis method that pairs open-source Verilog snippets with LLM-generated NL descriptions, verifies code-NL-code consistency via the generated testbench, and filters out inequivalent examples to yield a high-quality dataset. Third, we employ a two-stage "distill-then-RL" training pipeline: distillation for the cold start of reasoning abilities, followed by adaptive DAPO, our novel RLVR algorithm that can reduce training cost by adaptively adjusting sampling rate. The resulting model, CodeV-R1-7B, achieves 68.6% and 72.9% pass@1 on VerilogEval v2 and RTLLM v1.1, respectively, surpassing prior state-of-the-art by 12~20%, while matching or even exceeding the performance of 671B DeepSeek-R1. We will release our model, training pipeline, and dataset to facilitate research in EDA and LLM communities.
World-Consistent Data Generation for Vision-and-Language Navigation
Dec 09, 2024Vision-and-Language Navigation (VLN) is a challenging task that requires an agent to navigate through photorealistic environments following natural-language instructions. One main obstacle existing in VLN is data scarcity, leading to poor generalization performance over unseen environments. Tough data argumentation is a promising way for scaling up the dataset, how to generate VLN data both diverse and world-consistent remains problematic. To cope with this issue, we propose the world-consistent data generation (WCGEN), an efficacious data-augmentation framework satisfying both diversity and world-consistency, targeting at enhancing the generalizations of agents to novel environments. Roughly, our framework consists of two stages, the trajectory stage which leverages a point-cloud based technique to ensure spatial coherency among viewpoints, and the viewpoint stage which adopts a novel angle synthesis method to guarantee spatial and wraparound consistency within the entire observation. By accurately predicting viewpoint changes with 3D knowledge, our approach maintains the world-consistency during the generation procedure. Experiments on a wide range of datasets verify the effectiveness of our method, demonstrating that our data augmentation strategy enables agents to achieve new state-of-the-art results on all navigation tasks, and is capable of enhancing the VLN agents' generalization ability to unseen environments.
Ex3: Automatic Novel Writing by Extracting, Excelsior and Expanding
Aug 16, 2024



Generating long-term texts such as novels using artificial intelligence has always been a challenge. A common approach is to use large language models (LLMs) to construct a hierarchical framework that first plans and then writes. Despite the fact that the generated novels reach a sufficient length, they exhibit poor logical coherence and appeal in their plots and deficiencies in character and event depiction, ultimately compromising the overall narrative quality. In this paper, we propose a method named Extracting Excelsior and Expanding. Ex3 initially extracts structure information from raw novel data. By combining this structure information with the novel data, an instruction-following dataset is meticulously crafted. This dataset is then utilized to fine-tune the LLM, aiming for excelsior generation performance. In the final stage, a tree-like expansion method is deployed to facilitate the generation of arbitrarily long novels. Evaluation against previous methods showcases Ex3's ability to produce higher-quality long-form novels.
CodeV: Empowering LLMs for Verilog Generation through Multi-Level Summarization
Jul 16, 2024The increasing complexity and high costs associated with modern processor design have led to a surge in demand for processor design automation. Instruction-tuned large language models (LLMs) have demonstrated remarkable performance in automatically generating code for general-purpose programming languages like Python. However, these methods fail on hardware description languages (HDLs) like Verilog due to the scarcity of high-quality instruction tuning data, as even advanced LLMs like GPT-3.5 exhibit limited performance on Verilog generation. Regarding this issue, we observe that (1) Verilog code collected from the real world has higher quality than those generated by LLMs. (2) LLMs like GPT-3.5 excel in summarizing Verilog code rather than generating it. Based on these observations, this paper introduces CodeV, a series of open-source instruction-tuned Verilog generation LLMs. Instead of generating descriptions first and then getting the corresponding code from advanced LLMs, we prompt the LLM with Verilog code and let the LLM generate the corresponding natural language description by multi-level summarization. Experimental results show that CodeV relatively surpasses the previous open-source SOTA by 14.4% (BetterV in VerilogEval) and 11.3% (RTLCoder in RTLLM) respectively, and also relatively outperforms previous commercial SOTA GPT-4 by 22.1% in VerilogEval.
InverseCoder: Unleashing the Power of Instruction-Tuned Code LLMs with Inverse-Instruct
Jul 08, 2024Recent advancements in open-source code large language models (LLMs) have demonstrated remarkable coding abilities by fine-tuning on the data generated from powerful closed-source LLMs such as GPT-3.5 and GPT-4 for instruction tuning. This paper explores how to further improve an instruction-tuned code LLM by generating data from itself rather than querying closed-source LLMs. Our key observation is the misalignment between the translation of formal and informal languages: translating formal language (i.e., code) to informal language (i.e., natural language) is more straightforward than the reverse. Based on this observation, we propose INVERSE-INSTRUCT, which summarizes instructions from code snippets instead of the reverse. Specifically, given an instruction tuning corpus for code and the resulting instruction-tuned code LLM, we ask the code LLM to generate additional high-quality instructions for the original corpus through code summarization and self-evaluation. Then, we fine-tune the base LLM on the combination of the original corpus and the self-generated one, which yields a stronger instruction-tuned LLM. We present a series of code LLMs named InverseCoder, which surpasses the performance of the original code LLMs on a wide range of benchmarks, including Python text-to-code generation, multilingual coding, and data-science code generation.
Luban: Building Open-Ended Creative Agents via Autonomous Embodied Verification
May 24, 2024Building open agents has always been the ultimate goal in AI research, and creative agents are the more enticing. Existing LLM agents excel at long-horizon tasks with well-defined goals (e.g., `mine diamonds' in Minecraft). However, they encounter difficulties on creative tasks with open goals and abstract criteria due to the inability to bridge the gap between them, thus lacking feedback for self-improvement in solving the task. In this work, we introduce autonomous embodied verification techniques for agents to fill the gap, laying the groundwork for creative tasks. Specifically, we propose the Luban agent target creative building tasks in Minecraft, which equips with two-level autonomous embodied verification inspired by human design practices: (1) visual verification of 3D structural speculates, which comes from agent synthesized CAD modeling programs; (2) pragmatic verification of the creation by generating and verifying environment-relevant functionality programs based on the abstract criteria. Extensive multi-dimensional human studies and Elo ratings show that the Luban completes diverse creative building tasks in our proposed benchmark and outperforms other baselines ($33\%$ to $100\%$) in both visualization and pragmatism. Additional demos on the real-world robotic arm show the creation potential of the Luban in the physical world.
Non-autoregressive Machine Translation with Probabilistic Context-free Grammar
Nov 14, 2023



Non-autoregressive Transformer(NAT) significantly accelerates the inference of neural machine translation. However, conventional NAT models suffer from limited expression power and performance degradation compared to autoregressive (AT) models due to the assumption of conditional independence among target tokens. To address these limitations, we propose a novel approach called PCFG-NAT, which leverages a specially designed Probabilistic Context-Free Grammar (PCFG) to enhance the ability of NAT models to capture complex dependencies among output tokens. Experimental results on major machine translation benchmarks demonstrate that PCFG-NAT further narrows the gap in translation quality between NAT and AT models. Moreover, PCFG-NAT facilitates a deeper understanding of the generated sentences, addressing the lack of satisfactory explainability in neural machine translation.Code is publicly available at https://github.com/ictnlp/PCFG-NAT.
Emergent Communication for Rules Reasoning
Nov 08, 2023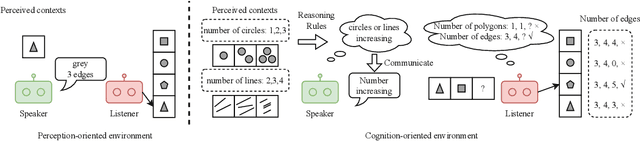
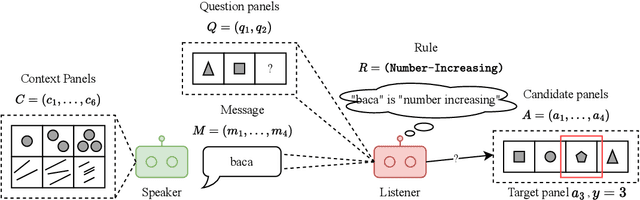

Research on emergent communication between deep-learning-based agents has received extensive attention due to its inspiration for linguistics and artificial intelligence. However, previous attempts have hovered around emerging communication under perception-oriented environmental settings, that forces agents to describe low-level perceptual features intra image or symbol contexts. In this work, inspired by the classic human reasoning test (namely Raven's Progressive Matrix), we propose the Reasoning Game, a cognition-oriented environment that encourages agents to reason and communicate high-level rules, rather than perceived low-level contexts. Moreover, we propose 1) an unbiased dataset (namely rule-RAVEN) as a benchmark to avoid overfitting, 2) and a two-stage curriculum agent training method as a baseline for more stable convergence in the Reasoning Game, where contexts and semantics are bilaterally drifting. Experimental results show that, in the Reasoning Game, a semantically stable and compositional language emerges to solve reasoning problems. The emerged language helps agents apply the extracted rules to the generalization of unseen context attributes, and to the transfer between different context attributes or even tasks.
Efficient Symbolic Policy Learning with Differentiable Symbolic Expression
Nov 02, 2023



Deep reinforcement learning (DRL) has led to a wide range of advances in sequential decision-making tasks. However, the complexity of neural network policies makes it difficult to understand and deploy with limited computational resources. Currently, employing compact symbolic expressions as symbolic policies is a promising strategy to obtain simple and interpretable policies. Previous symbolic policy methods usually involve complex training processes and pre-trained neural network policies, which are inefficient and limit the application of symbolic policies. In this paper, we propose an efficient gradient-based learning method named Efficient Symbolic Policy Learning (ESPL) that learns the symbolic policy from scratch in an end-to-end way. We introduce a symbolic network as the search space and employ a path selector to find the compact symbolic policy. By doing so we represent the policy with a differentiable symbolic expression and train it in an off-policy manner which further improves the efficiency. In addition, in contrast with previous symbolic policies which only work in single-task RL because of complexity, we expand ESPL on meta-RL to generate symbolic policies for unseen tasks. Experimentally, we show that our approach generates symbolic policies with higher performance and greatly improves data efficiency for single-task RL. In meta-RL, we demonstrate that compared with neural network policies the proposed symbolic policy achieves higher performance and efficiency and shows the potential to be interpretable.