 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFastUMI-100K: Advancing Data-driven Robotic Manipulation with a Large-scale UMI-style Dataset
Oct 09, 2025Data-driven robotic manipulation learning depends on large-scale, high-quality expert demonstration datasets. However, existing datasets, which primarily rely on human teleoperated robot collection, are limited in terms of scalability, trajectory smoothness, and applicability across different robotic embodiments in real-world environments. In this paper, we present FastUMI-100K, a large-scale UMI-style multimodal demonstration dataset, designed to overcome these limitations and meet the growing complexity of real-world manipulation tasks. Collected by FastUMI, a novel robotic system featuring a modular, hardware-decoupled mechanical design and an integrated lightweight tracking system, FastUMI-100K offers a more scalable, flexible, and adaptable solution to fulfill the diverse requirements of real-world robot demonstration data. Specifically, FastUMI-100K contains over 100K+ demonstration trajectories collected across representative household environments, covering 54 tasks and hundreds of object types. Our dataset integrates multimodal streams, including end-effector states, multi-view wrist-mounted fisheye images and textual annotations. Each trajectory has a length ranging from 120 to 500 frames. Experimental results demonstrate that FastUMI-100K enables high policy success rates across various baseline algorithms, confirming its robustness, adaptability, and real-world applicability for solving complex, dynamic manipulation challenges. The source code and dataset will be released in this link https://github.com/MrKeee/FastUMI-100K.
TreeSynth: Synthesizing Diverse Data from Scratch via Tree-Guided Subspace Partitioning
Mar 21, 2025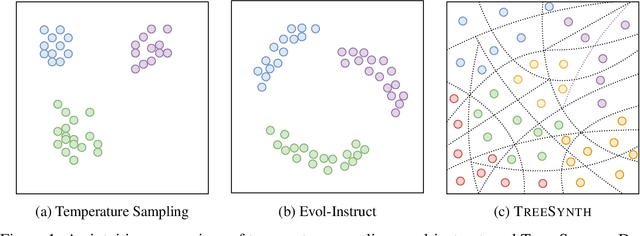
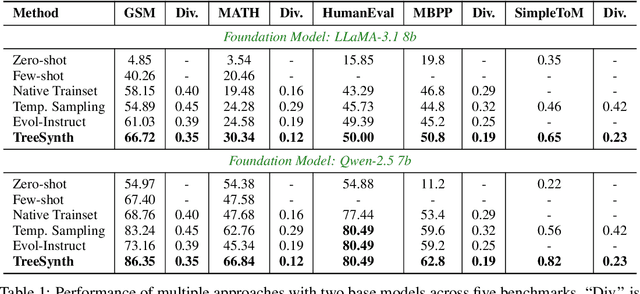
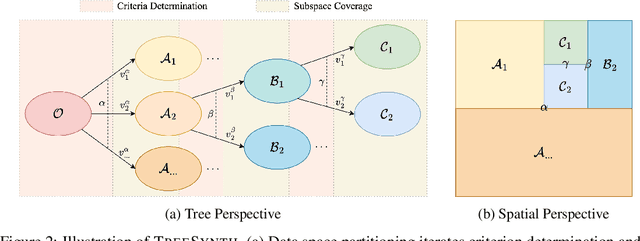
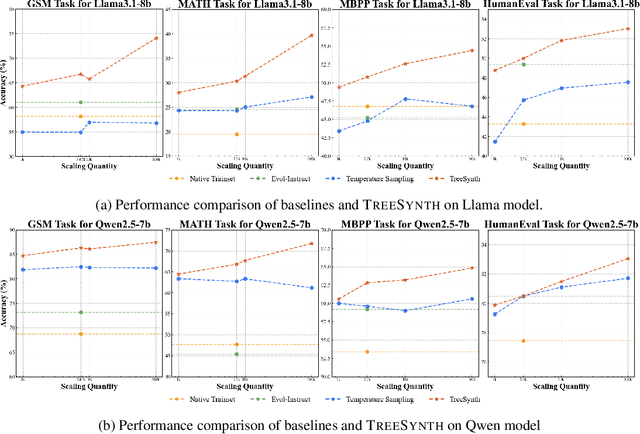
Model customization requires high-quality and diverse datasets, but acquiring such data remains challenging and costly. Although large language models (LLMs) can synthesize training data, current approaches are constrained by limited seed data, model bias and insufficient control over the generation process, resulting in limited diversity and biased distribution with the increase of data scales. To tackle this challenge, we present TreeSynth, a tree-guided subspace-based data synthesis framework that recursively partitions the entire data space into hierar-chical subspaces, enabling comprehensive and diverse scaling of data synthesis. Briefly, given a task-specific description, we construct a data space partitioning tree by iteratively executing criteria determination and subspace coverage steps. This hierarchically divides the whole space (i.e., root node) into mutually exclusive and complementary atomic subspaces (i.e., leaf nodes). By collecting synthesized data according to the attributes of each leaf node, we obtain a diverse dataset that fully covers the data space. Empirically, our extensive experiments demonstrate that TreeSynth surpasses both human-designed datasets and the state-of-the-art data synthesis baselines, achieving maximum improvements of 45.2% in data diversity and 17.6% in downstream task performance across various models and tasks. Hopefully, TreeSynth provides a scalable solution to synthesize diverse and comprehensive datasets from scratch without human intervention.
Large Language Models in Bioinformatics: A Survey
Mar 06, 2025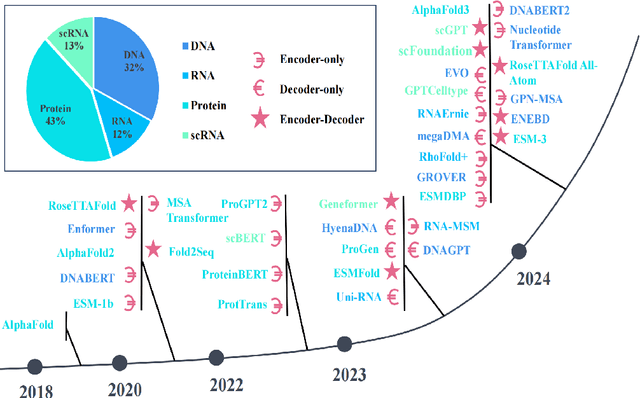
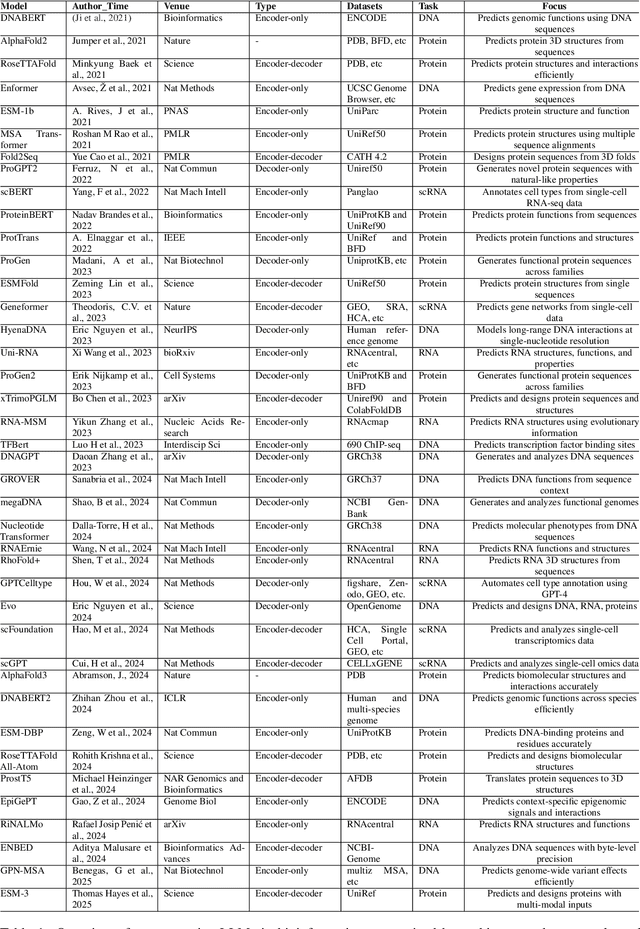
Large Language Models (LLMs) are revolutionizing bioinformatics, enabling advanced analysis of DNA, RNA, proteins, and single-cell data. This survey provides a systematic review of recent advancements, focusing on genomic sequence modeling, RNA structure prediction, protein function inference, and single-cell transcriptomics. Meanwhile, we also discuss several key challenges, including data scarcity, computational complexity, and cross-omics integration, and explore future directions such as multimodal learning, hybrid AI models, and clinical applications. By offering a comprehensive perspective, this paper underscores the transformative potential of LLMs in driving innovations in bioinformatics and precision medicine.
Developing and Utilizing a Large-Scale Cantonese Dataset for Multi-Tasking in Large Language Models
Mar 05, 2025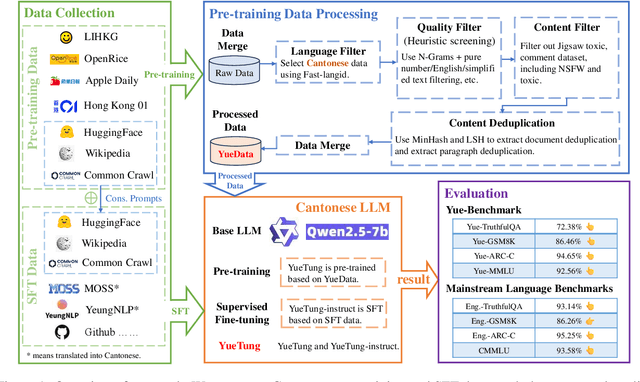
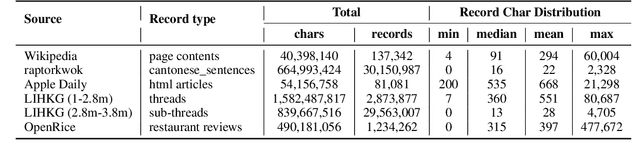
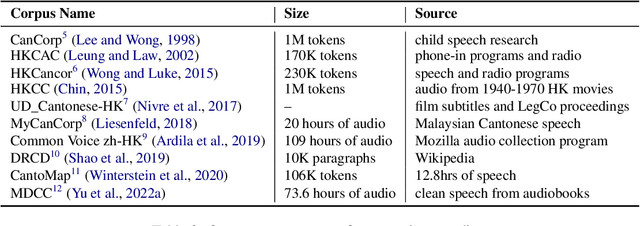
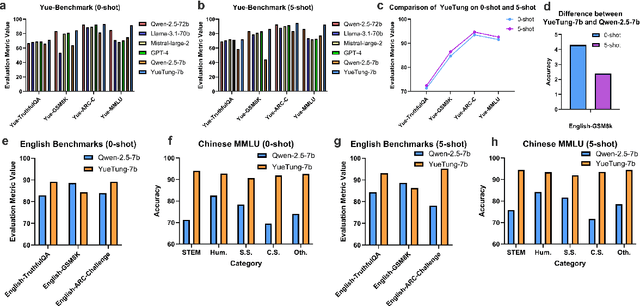
High-quality data resources play a crucial role in learning large language models (LLMs), particularly for low-resource languages like Cantonese. Despite having more than 85 million native speakers, Cantonese is still considered a low-resource language in the field of natural language processing (NLP) due to factors such as the dominance of Mandarin, lack of cohesion within the Cantonese-speaking community, diversity in character encoding and input methods, and the tendency of overseas Cantonese speakers to prefer using English. In addition, rich colloquial vocabulary of Cantonese, English loanwords, and code-switching characteristics add to the complexity of corpus collection and processing. To address these challenges, we collect Cantonese texts from a variety of sources, including open source corpora, Hong Kong-specific forums, Wikipedia, and Common Crawl data. We conduct rigorous data processing through language filtering, quality filtering, content filtering, and de-duplication steps, successfully constructing a high-quality Cantonese corpus of over 2 billion tokens for training large language models. We further refined the model through supervised fine-tuning (SFT) on curated Cantonese tasks, enhancing its ability to handle specific applications. Upon completion of the training, the model achieves state-of-the-art (SOTA) performance on four Cantonese benchmarks. After training on our dataset, the model also exhibits improved performance on other mainstream language tasks.
OpenFly: A Versatile Toolchain and Large-scale Benchmark for Aerial Vision-Language Navigation
Feb 25, 2025Vision-Language Navigation (VLN) aims to guide agents through an environment by leveraging both language instructions and visual cues, playing a pivotal role in embodied AI. Indoor VLN has been extensively studied, whereas outdoor aerial VLN remains underexplored. The potential reason is that outdoor aerial view encompasses vast areas, making data collection more challenging, which results in a lack of benchmarks. To address this problem, we propose OpenFly, a platform comprising a versatile toolchain and large-scale benchmark for aerial VLN. Firstly, we develop a highly automated toolchain for data collection, enabling automatic point cloud acquisition, scene semantic segmentation, flight trajectory creation, and instruction generation. Secondly, based on the toolchain, we construct a large-scale aerial VLN dataset with 100k trajectories, covering diverse heights and lengths across 18 scenes. The corresponding visual data are generated using various rendering engines and advanced techniques, including Unreal Engine, GTA V, Google Earth, and 3D Gaussian Splatting (3D GS). All data exhibit high visual quality. Particularly, 3D GS supports real-to-sim rendering, further enhancing the realism of the dataset. Thirdly, we propose OpenFly-Agent, a keyframe-aware VLN model, which takes language instructions, current observations, and historical keyframes as input, and outputs flight actions directly. Extensive analyses and experiments are conducted, showcasing the superiority of our OpenFly platform and OpenFly-Agent. The toolchain, dataset, and codes will be open-sourced.
MoS: Unleashing Parameter Efficiency of Low-Rank Adaptation with Mixture of Shards
Oct 01, 2024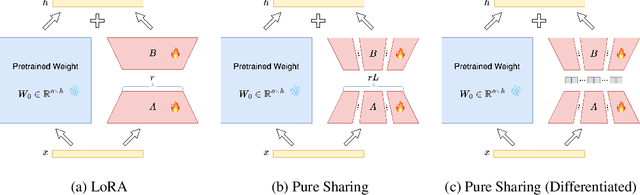

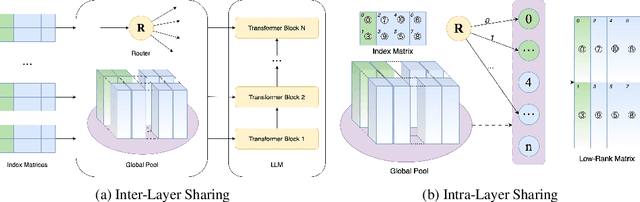
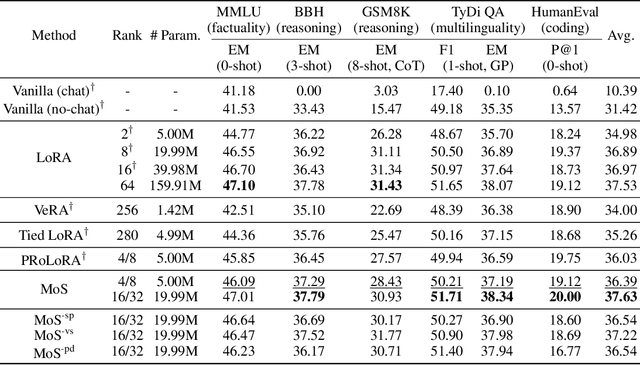
The rapid scaling of large language models necessitates more lightweight finetuning methods to reduce the explosive GPU memory overhead when numerous customized models are served simultaneously. Targeting more parameter-efficient low-rank adaptation (LoRA), parameter sharing presents a promising solution. Empirically, our research into high-level sharing principles highlights the indispensable role of differentiation in reversing the detrimental effects of pure sharing. Guided by this finding, we propose Mixture of Shards (MoS), incorporating both inter-layer and intra-layer sharing schemes, and integrating four nearly cost-free differentiation strategies, namely subset selection, pair dissociation, vector sharding, and shard privatization. Briefly, it selects a designated number of shards from global pools with a Mixture-of-Experts (MoE)-like routing mechanism before sequentially concatenating them to low-rank matrices. Hence, it retains all the advantages of LoRA while offering enhanced parameter efficiency, and effectively circumvents the drawbacks of peer parameter-sharing methods. Our empirical experiments demonstrate approximately 8x parameter savings in a standard LoRA setting. The ablation study confirms the significance of each component. Our insights into parameter sharing and MoS method may illuminate future developments of more parameter-efficient finetuning methods.
AlignBot: Aligning VLM-powered Customized Task Planning with User Reminders Through Fine-Tuning for Household Robots
Sep 18, 2024



This paper presents AlignBot, a novel framework designed to optimize VLM-powered customized task planning for household robots by effectively aligning with user reminders. In domestic settings, aligning task planning with user reminders poses significant challenges due to the limited quantity, diversity, and multimodal nature of the reminders. To address these challenges, AlignBot employs a fine-tuned LLaVA-7B model, functioning as an adapter for GPT-4o. This adapter model internalizes diverse forms of user reminders-such as personalized preferences, corrective guidance, and contextual assistance-into structured instruction-formatted cues that prompt GPT-4o in generating customized task plans. Additionally, AlignBot integrates a dynamic retrieval mechanism that selects task-relevant historical successes as prompts for GPT-4o, further enhancing task planning accuracy. To validate the effectiveness of AlignBot, experiments are conducted in real-world household environments, which are constructed within the laboratory to replicate typical household settings. A multimodal dataset with over 1,500 entries derived from volunteer reminders is used for training and evaluation. The results demonstrate that AlignBot significantly improves customized task planning, outperforming existing LLM- and VLM-powered planners by interpreting and aligning with user reminders, achieving 86.8% success rate compared to the vanilla GPT-4o baseline at 21.6%, reflecting a 65% improvement and over four times greater effectiveness. Supplementary materials are available at: https://yding25.com/AlignBot/
How Far Can Cantonese NLP Go? Benchmarking Cantonese Capabilities of Large Language Models
Aug 29, 2024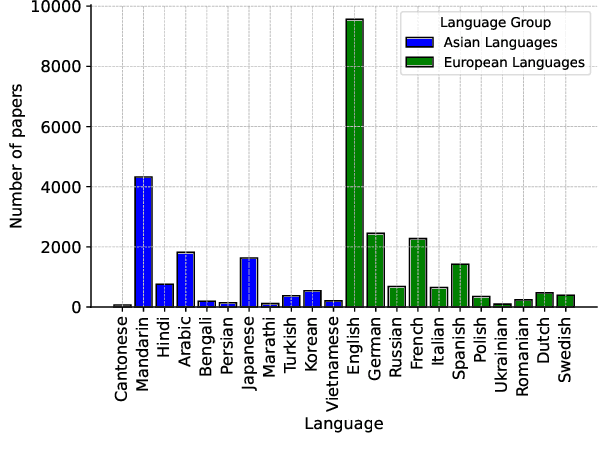
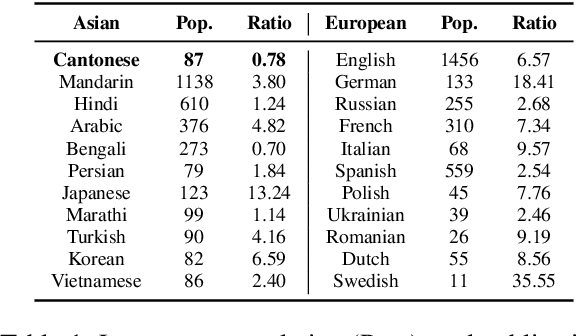
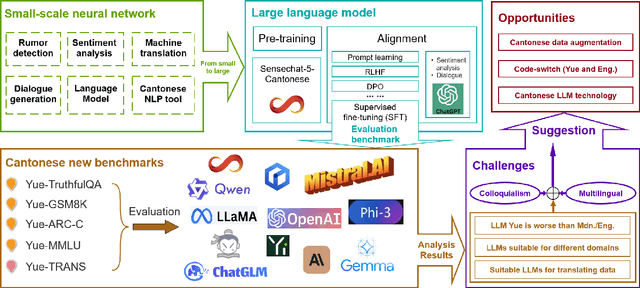
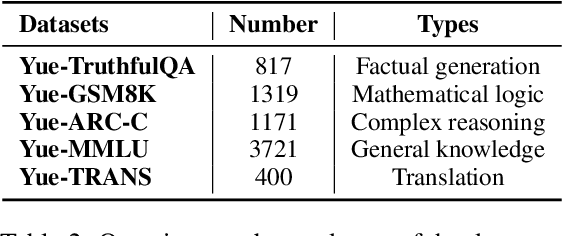
The rapid evolution of large language models (LLMs) has transformed the competitive landscape in natural language processing (NLP), particularly for English and other data-rich languages. However, underrepresented languages like Cantonese, spoken by over 85 million people, face significant development gaps, which is particularly concerning given the economic significance of the Guangdong-Hong Kong-Macau Greater Bay Area, and in substantial Cantonese-speaking populations in places like Singapore and North America. Despite its wide use, Cantonese has scant representation in NLP research, especially compared to other languages from similarly developed regions. To bridge these gaps, we outline current Cantonese NLP methods and introduce new benchmarks designed to evaluate LLM performance in factual generation, mathematical logic, complex reasoning, and general knowledge in Cantonese, which aim to advance open-source Cantonese LLM technology. We also propose future research directions and recommended models to enhance Cantonese LLM development.