 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAION: Aerial Indoor Object-Goal Navigation Using Dual-Policy Reinforcement Learning
Jan 22, 2026Object-Goal Navigation (ObjectNav) requires an agent to autonomously explore an unknown environment and navigate toward target objects specified by a semantic label. While prior work has primarily studied zero-shot ObjectNav under 2D locomotion, extending it to aerial platforms with 3D locomotion capability remains underexplored. Aerial robots offer superior maneuverability and search efficiency, but they also introduce new challenges in spatial perception, dynamic control, and safety assurance. In this paper, we propose AION for vision-based aerial ObjectNav without relying on external localization or global maps. AION is an end-to-end dual-policy reinforcement learning (RL) framework that decouples exploration and goal-reaching behaviors into two specialized policies. We evaluate AION on the AI2-THOR benchmark and further assess its real-time performance in IsaacSim using high-fidelity drone models. Experimental results show that AION achieves superior performance across comprehensive evaluation metrics in exploration, navigation efficiency, and safety. The video can be found at https://youtu.be/TgsUm6bb7zg.
Learning Agile Gate Traversal via Analytical Optimal Policy Gradient
Aug 29, 2025Traversing narrow gates presents a significant challenge and has become a standard benchmark for evaluating agile and precise quadrotor flight. Traditional modularized autonomous flight stacks require extensive design and parameter tuning, while end-to-end reinforcement learning (RL) methods often suffer from low sample efficiency and limited interpretability. In this work, we present a novel hybrid framework that adaptively fine-tunes model predictive control (MPC) parameters online using outputs from a neural network (NN) trained offline. The NN jointly predicts a reference pose and cost-function weights, conditioned on the coordinates of the gate corners and the current drone state. To achieve efficient training, we derive analytical policy gradients not only for the MPC module but also for an optimization-based gate traversal detection module. Furthermore, we introduce a new formulation of the attitude tracking error that admits a simplified representation, facilitating effective learning with bounded gradients. Hardware experiments demonstrate that our method enables fast and accurate quadrotor traversal through narrow gates in confined environments. It achieves several orders of magnitude improvement in sample efficiency compared to naive end-to-end RL approaches.
GarchingSim: An Autonomous Driving Simulator with Photorealistic Scenes and Minimalist Workflow
Jan 30, 2024



Conducting real road testing for autonomous driving algorithms can be expensive and sometimes impractical, particularly for small startups and research institutes. Thus, simulation becomes an important method for evaluating these algorithms. However, the availability of free and open-source simulators is limited, and the installation and configuration process can be daunting for beginners and interdisciplinary researchers. We introduce an autonomous driving simulator with photorealistic scenes, meanwhile keeping a user-friendly workflow. The simulator is able to communicate with external algorithms through ROS2 or Socket.IO, making it compatible with existing software stacks. Furthermore, we implement a highly accurate vehicle dynamics model within the simulator to enhance the realism of the vehicle's physical effects. The simulator is able to serve various functions, including generating synthetic data and driving with machine learning-based algorithms. Moreover, we prioritize simplicity in the deployment process, ensuring that beginners find it approachable and user-friendly.
Depth-NeuS: Neural Implicit Surfaces Learning for Multi-view Reconstruction Based on Depth Information Optimization
Mar 30, 2023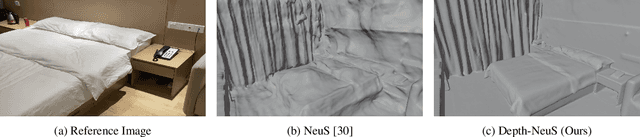
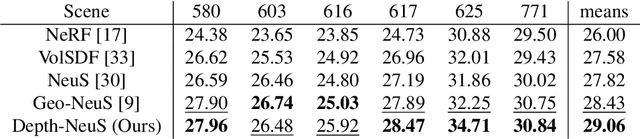


Recently, methods for neural surface representation and rendering, for example NeuS, have shown that learning neural implicit surfaces through volume rendering is becoming increasingly popular and making good progress. However, these methods still face some challenges. Existing methods lack a direct representation of depth information, which makes object reconstruction unrestricted by geometric features, resulting in poor reconstruction of objects with texture and color features. This is because existing methods only use surface normals to represent implicit surfaces without using depth information. Therefore, these methods cannot model the detailed surface features of objects well. To address this problem, we propose a neural implicit surface learning method called Depth-NeuS based on depth information optimization for multi-view reconstruction. In this paper, we introduce depth loss to explicitly constrain SDF regression and introduce geometric consistency loss to optimize for low-texture areas. Specific experiments show that Depth-NeuS outperforms existing technologies in multiple scenarios and achieves high-quality surface reconstruction in multiple scenarios.