 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniHands: Unifying Various Wild-Collected Keypoints for Personalized Hand Reconstruction
Nov 18, 2024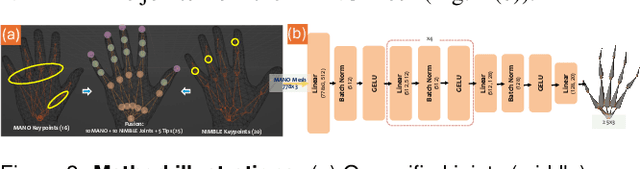
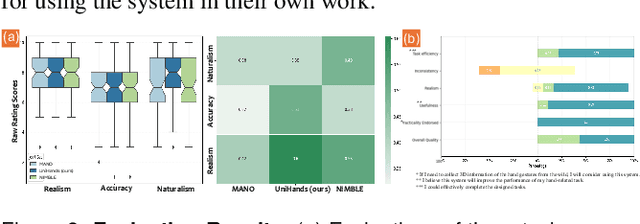
Accurate hand motion capture and standardized 3D representation are essential for various hand-related tasks. Collecting keypoints-only data, while efficient and cost-effective, results in low-fidelity representations and lacks surface information. Furthermore, data inconsistencies across sources challenge their integration and use. We present UniHands, a novel method for creating standardized yet personalized hand models from wild-collected keypoints from diverse sources. Unlike existing neural implicit representation methods, UniHands uses the widely-adopted parametric models MANO and NIMBLE, providing a more scalable and versatile solution. It also derives unified hand joints from the meshes, which facilitates seamless integration into various hand-related tasks. Experiments on the FreiHAND and InterHand2.6M datasets demonstrate its ability to precisely reconstruct hand mesh vertices and keypoints, effectively capturing high-degree articulation motions. Empirical studies involving nine participants show a clear preference for our unified joints over existing configurations for accuracy and naturalism (p-value 0.016).
DVIO: Depth aided visual inertial odometry for RGBD sensors
Oct 20, 2021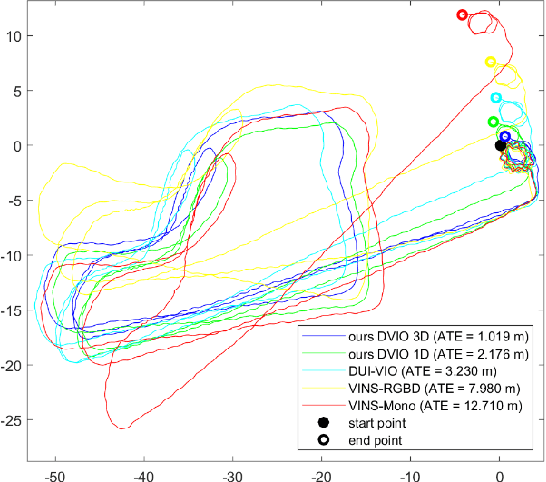
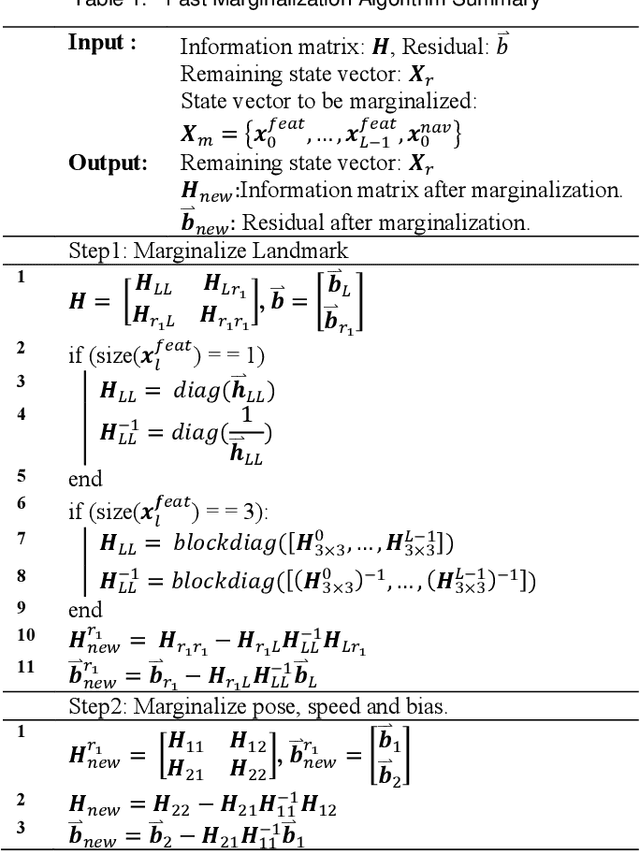
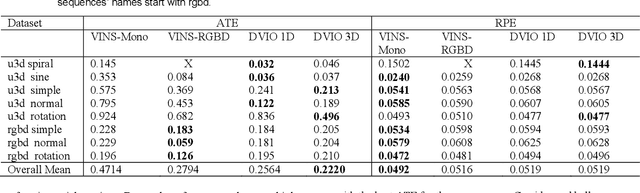
In past few years we have observed an increase in the usage of RGBD sensors in mobile devices. These sensors provide a good estimate of the depth map for the camera frame, which can be used in numerous augmented reality applications. This paper presents a new visual inertial odometry (VIO) system, which uses measurements from a RGBD sensor and an inertial measurement unit (IMU) sensor for estimating the motion state of the mobile device. The resulting system is called the depth-aided VIO (DVIO) system. In this system we add the depth measurement as part of the nonlinear optimization process. Specifically, we propose methods to use the depth measurement using one-dimensional (1D) feature parameterization as well as three-dimensional (3D) feature parameterization. In addition, we propose to utilize the depth measurement for estimating time offset between the unsynchronized IMU and the RGBD sensors. Last but not least, we propose a novel block-based marginalization approach to speed up the marginalization processes and maintain the real-time performance of the overall system. Experimental results validate that the proposed DVIO system outperforms the other state-of-the-art VIO systems in terms of trajectory accuracy as well as processing time.