 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Graph Matching through Semantic Relationship Generation for SLAM
Apr 28, 2026Graph-based representations such as Scene Graphs enable localization in structured indoor environments by matching a locally observed graph, constructed from sensor data, to a prior map. This process is particularly challenging in environments with repetitive or symmetric layouts, where structural cues alone are often insufficient to resolve ambiguities. We propose a semantic-enhanced graph matching approach that explicitly models relations between detected objects and structural elements, such as rooms and wall planes. Objects are detected from RGB-D data and integrated into the graph, and their relations to structural elements are exploited to filter candidate correspondences prior to geometric verification, significantly reducing ambiguity and search complexity. The proposed method is integrated within the iS-Graphs framework and evaluated in synthetic and simulated environments. Results show that semantic relations significantly reduce the number of candidate matches, improve computational efficiency, and enable faster convergence, particularly in symmetric scenarios where purely geometric approaches fail.
COMPASS: COmpact Multi-channel Prior-map And Scene Signature for Floor-Plan-Based Visual Localization
Apr 28, 2026Architectural floor plans are widely available priors which contain not only geometry but also the semantic information of the environment, yet existing localization methods largely ignore this semantic information. To address this, we present COMPASS, an algorithm that exploits both geometric and semantic priors from floor plans to estimate the pose of a robot equipped with dual fisheye cameras. Inspired by scan context descriptor from LiDAR-based place recognition, we design a multi-channel radial descriptor that encodes the geometric layout surrounding a position. From the floor plan, rays are cast in 360 azimuth bins and the results are encoded into five channels: normalized range, structural hit type (wall, window, or opening), range gradient, inverse range, and local range variance. From the image side, the same descriptor structure is populated by detecting structural elements in the fisheye imagery. As a first step toward full cross-modal matching, we present a window detection algorithm for fisheye images that uses a line segment detector to identify window frames via vertical edge clustering and brightness verification. Detected windows are projected to azimuthal bearings through the fisheye camera model, producing the hit-type channel of the visual descriptor. As a proof of concept, we generate both descriptors at a single known pose from the Hilti-Trimble SLAM Challenge 2026 dataset and demonstrate that the wall-window pattern extracted from the first frame of each camera closely matches the floor plan descriptor, validating the feasibility of cross-modal structural matching.
Passage-Aware Structural Mapping for RGB-D Visual SLAM
Apr 27, 2026Doorways and passages are critical structural elements for indoor robot navigation, yet they remain underexplored in modern Visual SLAM (VSLAM) frameworks. This paper presents a passage-aware structural mapping approach for RGB-D VSLAM that detects doors and traversable openings by jointly fusing geometric, semantic, and topological cues. Doors are modeled as planar entities embedded within walls and classified as traversable or non-traversable based on their coplanarity with the supporting wall. Passages are inferred through two complementary strategies: traversal evidence accumulated from camera-wall interactions across consecutive keyframes, and geometric opening validation based on discontinuities in the mapped wall geometry. The proposed method is integrated into vS-Graphs as a proof of concept, enriching its scene graph with passage-level abstractions and improving room connectivity modeling. Qualitative evaluations on indoor office sequences demonstrate reliable doorway detection, and the framework lays the foundation for exploiting these elements in BIM-informed VSLAM. The source code is publicly available at https://github.com/snt-arg/visual_sgraphs/tree/doorway_integration.
Human Interaction for Collaborative Semantic SLAM using Extended Reality
Sep 18, 2025Semantic SLAM (Simultaneous Localization and Mapping) systems enrich robot maps with structural and semantic information, enabling robots to operate more effectively in complex environments. However, these systems struggle in real-world scenarios with occlusions, incomplete data, or ambiguous geometries, as they cannot fully leverage the higher-level spatial and semantic knowledge humans naturally apply. We introduce HICS-SLAM, a Human-in-the-Loop semantic SLAM framework that uses a shared extended reality environment for real-time collaboration. The system allows human operators to directly interact with and visualize the robot's 3D scene graph, and add high-level semantic concepts (e.g., rooms or structural entities) into the mapping process. We propose a graph-based semantic fusion methodology that integrates these human interventions with robot perception, enabling scalable collaboration for enhanced situational awareness. Experimental evaluations on real-world construction site datasets demonstrate improvements in room detection accuracy, map precision, and semantic completeness compared to automated baselines, demonstrating both the effectiveness of the approach and its potential for future extensions.
BIM Informed Visual SLAM for Construction Monitoring
Sep 17, 2025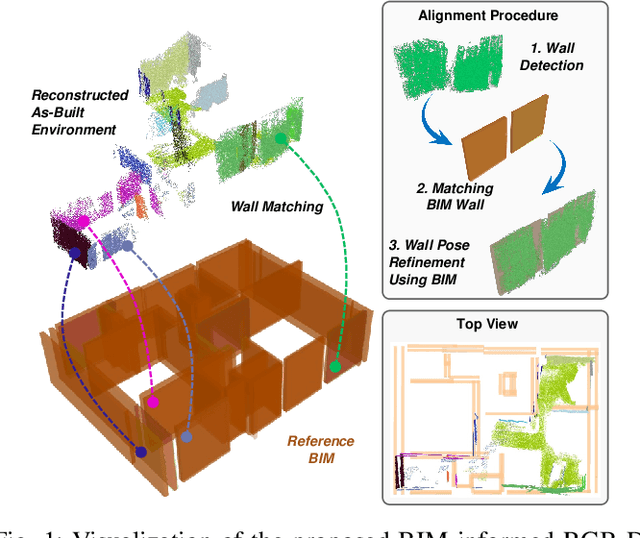

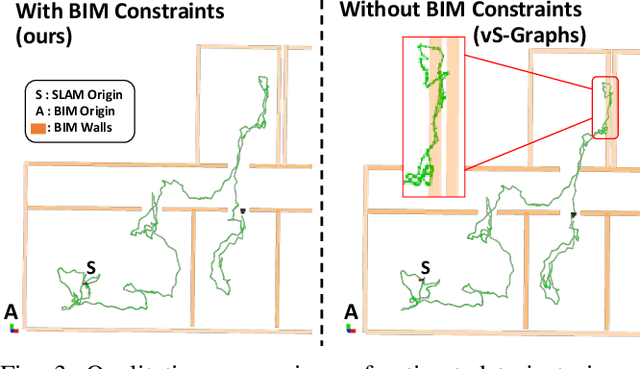

Simultaneous Localization and Mapping (SLAM) is a key tool for monitoring construction sites, where aligning the evolving as-built state with the as-planned design enables early error detection and reduces costly rework. LiDAR-based SLAM achieves high geometric precision, but its sensors are typically large and power-demanding, limiting their use on portable platforms. Visual SLAM offers a practical alternative with lightweight cameras already embedded in most mobile devices. however, visually mapping construction environments remains challenging: repetitive layouts, occlusions, and incomplete or low-texture structures often cause drift in the trajectory map. To mitigate this, we propose an RGB-D SLAM system that incorporates the Building Information Model (BIM) as structural prior knowledge. Instead of relying solely on visual cues, our system continuously establishes correspondences between detected wall and their BIM counterparts, which are then introduced as constraints in the back-end optimization. The proposed method operates in real time and has been validated on real construction sites, reducing trajectory error by an average of 23.71% and map RMSE by 7.14% compared to visual SLAM baselines. These results demonstrate that BIM constraints enable reliable alignment of the digital plan with the as-built scene, even under partially constructed conditions.
SMapper: A Multi-Modal Data Acquisition Platform for SLAM Benchmarking
Sep 11, 2025Advancing research in fields like Simultaneous Localization and Mapping (SLAM) and autonomous navigation critically depends on reliable and reproducible multimodal datasets. While several influential datasets have driven progress in these domains, they often suffer from limitations in sensing modalities, environmental diversity, and the reproducibility of the underlying hardware setups. To address these challenges, this paper introduces SMapper, a novel open-hardware, multi-sensor platform designed explicitly for, though not limited to, SLAM research. The device integrates synchronized LiDAR, multi-camera, and inertial sensing, supported by a robust calibration and synchronization pipeline that ensures precise spatio-temporal alignment across modalities. Its open and replicable design allows researchers to extend its capabilities and reproduce experiments across both handheld and robot-mounted scenarios. To demonstrate its practicality, we additionally release SMapper-light, a publicly available SLAM dataset containing representative indoor and outdoor sequences. The dataset includes tightly synchronized multimodal data and ground-truth trajectories derived from offline LiDAR-based SLAM with sub-centimeter accuracy, alongside dense 3D reconstructions. Furthermore, the paper contains benchmarking results on state-of-the-art LiDAR and visual SLAM frameworks using the SMapper-light dataset. By combining open-hardware design, reproducible data collection, and comprehensive benchmarking, SMapper establishes a robust foundation for advancing SLAM algorithm development, evaluation, and reproducibility.
Situationally-aware Path Planning Exploiting 3D Scene Graphs
Aug 08, 20253D Scene Graphs integrate both metric and semantic information, yet their structure remains underutilized for improving path planning efficiency and interpretability. In this work, we present S-Path, a situationally-aware path planner that leverages the metric-semantic structure of indoor 3D Scene Graphs to significantly enhance planning efficiency. S-Path follows a two-stage process: it first performs a search over a semantic graph derived from the scene graph to yield a human-understandable high-level path. This also identifies relevant regions for planning, which later allows the decomposition of the problem into smaller, independent subproblems that can be solved in parallel. We also introduce a replanning mechanism that, in the event of an infeasible path, reuses information from previously solved subproblems to update semantic heuristics and prioritize reuse to further improve the efficiency of future planning attempts. Extensive experiments on both real-world and simulated environments show that S-Path achieves average reductions of 5.7x in planning time while maintaining comparable path optimality to classical sampling-based planners and surpassing them in complex scenarios, making it an efficient and interpretable path planner for environments represented by indoor 3D Scene Graphs.
Barrier Method for Inequality Constrained Factor Graph Optimization with Application to Model Predictive Control
Jun 17, 2025Factor graphs have demonstrated remarkable efficiency for robotic perception tasks, particularly in localization and mapping applications. However, their application to optimal control problems -- especially Model Predictive Control (MPC) -- has remained limited due to fundamental challenges in constraint handling. This paper presents a novel integration of the Barrier Interior Point Method (BIPM) with factor graphs, implemented as an open-source extension to the widely adopted g2o framework. Our approach introduces specialized inequality factor nodes that encode logarithmic barrier functions, thereby overcoming the quadratic-form limitations of conventional factor graph formulations. To the best of our knowledge, this is the first g2o-based implementation capable of efficiently handling both equality and inequality constraints within a unified optimization backend. We validate the method through a multi-objective adaptive cruise control application for autonomous vehicles. Benchmark comparisons with state-of-the-art constraint-handling techniques demonstrate faster convergence and improved computational efficiency. (Code repository: https://github.com/snt-arg/bipm_g2o)
BIM-Constrained Optimization for Accurate Localization and Deviation Correction in Construction Monitoring
Apr 24, 2025Augmented reality (AR) applications for construction monitoring rely on real-time environmental tracking to visualize architectural elements. However, construction sites present significant challenges for traditional tracking methods due to featureless surfaces, dynamic changes, and drift accumulation, leading to misalignment between digital models and the physical world. This paper proposes a BIM-aware drift correction method to address these challenges. Instead of relying solely on SLAM-based localization, we align ``as-built" detected planes from the real-world environment with ``as-planned" architectural planes in BIM. Our method performs robust plane matching and computes a transformation (TF) between SLAM (S) and BIM (B) origin frames using optimization techniques, minimizing drift over time. By incorporating BIM as prior structural knowledge, we can achieve improved long-term localization and enhanced AR visualization accuracy in noisy construction environments. The method is evaluated through real-world experiments, showing significant reductions in drift-induced errors and optimized alignment consistency. On average, our system achieves a reduction of 52.24% in angular deviations and a reduction of 60.8% in the distance error of the matched walls compared to the initial manual alignment by the user.
Hardware, Algorithms, and Applications of the Neuromorphic Vision Sensor: a Review
Apr 11, 2025Neuromorphic, or event, cameras represent a transformation in the classical approach to visual sensing encodes detected instantaneous per-pixel illumination changes into an asynchronous stream of event packets. Their novelty compared to standard cameras lies in the transition from capturing full picture frames at fixed time intervals to a sparse data format which, with its distinctive qualities, offers potential improvements in various applications. However, these advantages come at the cost of reinventing algorithmic procedures or adapting them to effectively process the new data format. In this survey, we systematically examine neuromorphic vision along three main dimensions. First, we highlight the technological evolution and distinctive hardware features of neuromorphic cameras from their inception to recent models. Second, we review image processing algorithms developed explicitly for event-based data, covering key works on feature detection, tracking, and optical flow -which form the basis for analyzing image elements and transformations -as well as depth and pose estimation or object recognition, which interpret more complex scene structures and components. These techniques, drawn from classical computer vision and modern data-driven approaches, are examined to illustrate the breadth of applications for event-based cameras. Third, we present practical application case studies demonstrating how event cameras have been successfully used across various industries and scenarios. Finally, we analyze the challenges limiting widespread adoption, identify significant research gaps compared to standard imaging techniques, and outline promising future directions and opportunities that neuromorphic vision offers.