 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSituationally-aware Path Planning Exploiting 3D Scene Graphs
Aug 08, 20253D Scene Graphs integrate both metric and semantic information, yet their structure remains underutilized for improving path planning efficiency and interpretability. In this work, we present S-Path, a situationally-aware path planner that leverages the metric-semantic structure of indoor 3D Scene Graphs to significantly enhance planning efficiency. S-Path follows a two-stage process: it first performs a search over a semantic graph derived from the scene graph to yield a human-understandable high-level path. This also identifies relevant regions for planning, which later allows the decomposition of the problem into smaller, independent subproblems that can be solved in parallel. We also introduce a replanning mechanism that, in the event of an infeasible path, reuses information from previously solved subproblems to update semantic heuristics and prioritize reuse to further improve the efficiency of future planning attempts. Extensive experiments on both real-world and simulated environments show that S-Path achieves average reductions of 5.7x in planning time while maintaining comparable path optimality to classical sampling-based planners and surpassing them in complex scenarios, making it an efficient and interpretable path planner for environments represented by indoor 3D Scene Graphs.
S-Nav: Semantic-Geometric Planning for Mobile Robots
Jul 04, 2023Path planning is a basic capability of autonomous mobile robots. Former approaches in path planning exploit only the given geometric information from the environment without leveraging the inherent semantics within the environment. The recently presented S-Graphs constructs 3D situational graphs incorporating geometric, semantic, and relational aspects between the elements to improve the overall scene understanding and the localization of the robot. But these works do not exploit the underlying semantic graphs for improving the path planning for mobile robots. To that aim, in this paper, we present S-Nav a novel semantic-geometric path planner for mobile robots. It leverages S-Graphs to enable fast and robust hierarchical high-level planning in complex indoor environments. The hierarchical architecture of S-Nav adds a novel semantic search on top of a traditional geometric planner as well as precise map reconstruction from S-Graphs to improve planning speed, robustness, and path quality. We demonstrate improved results of S-Nav in a synthetic environment.
A Lightweight Universal Gripper with Low Activation Force for Aerial Grasping
Aug 23, 2022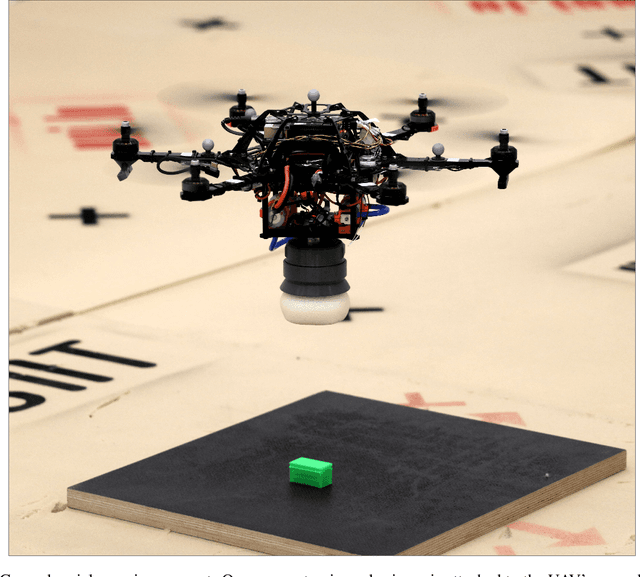
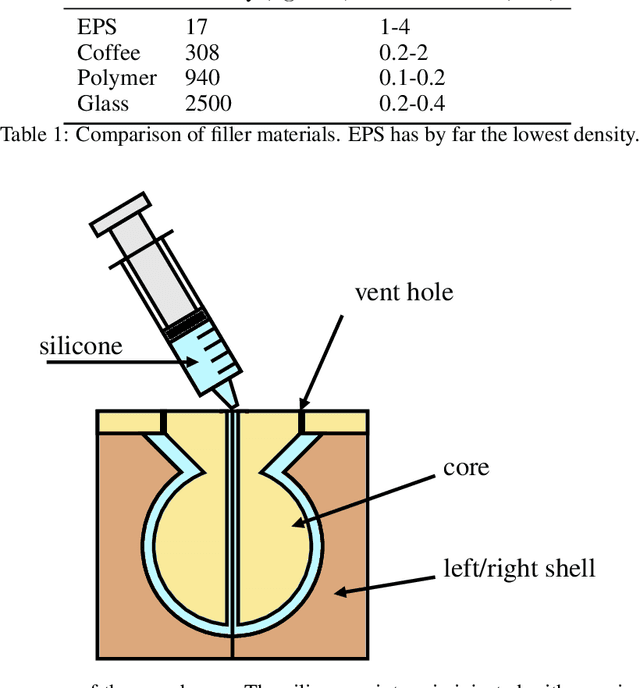
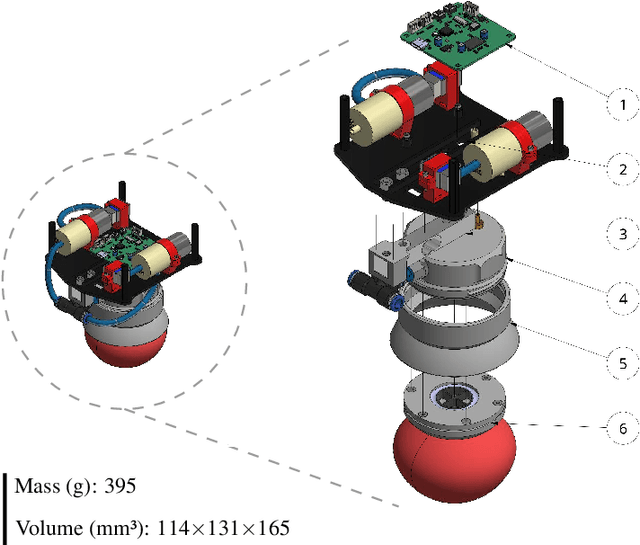
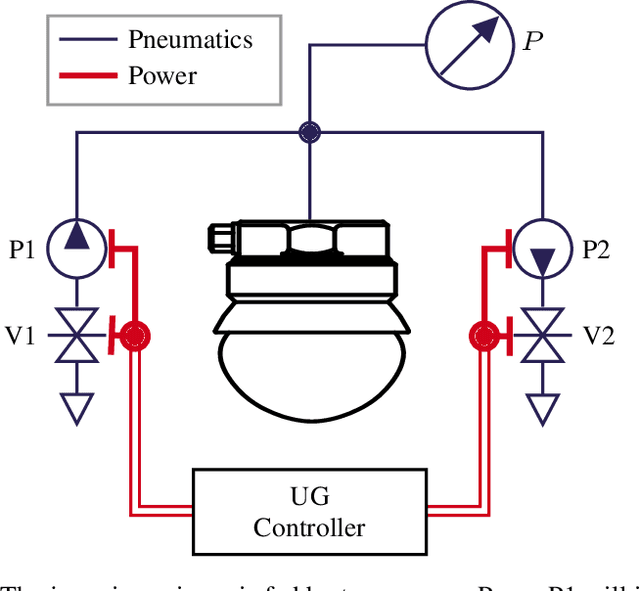
Soft robotic grippers have numerous advantages that address challenges in dynamic aerial grasping. Typical multi-fingered soft grippers recently showcased for aerial grasping are highly dependent on the direction of the target object for successful grasping. This study pushes the boundaries of dynamic aerial grasping by developing an omnidirectional system for autonomous aerial manipulation. In particular, the paper investigates the design, fabrication, and experimental verification of a novel, highly integrated, modular, sensor-rich, universal jamming gripper specifically designed for aerial applications. Leveraging recent developments in particle jamming and soft granular materials, the presented gripper produces a substantial holding force while being very lightweight, energy-efficient and only requiring a low activation force. We show that the holding force can be improved by up to 50% by adding an additive to the membrane's silicone mixture. The experiments show that our lightweight gripper can develop up to 15N of holding force with an activation force as low as 2.5N, even without geometric interlocking. Finally, a pick and release task is performed under real-world conditions by mounting the gripper onto a multi-copter. The developed aerial grasping system features many useful properties, such as resilience and robustness to collisions and the inherent passive compliance which decouples the UAV from the environment.
A Hybrid Modelling Approach for Aerial Manipulators
Jun 17, 2022Aerial manipulators (AM) exhibit particularly challenging, non-linear dynamics; the UAV and the manipulator it is carrying form a tightly coupled dynamic system, mutually impacting each other. The mathematical model describing these dynamics forms the core of many solutions in non-linear control and deep reinforcement learning. Traditionally, the formulation of the dynamics involves Euler angle parametrization in the Lagrangian framework or quaternion parametrization in the Newton-Euler framework. The former has the disadvantage of giving birth to singularities and the latter being algorithmically complex. This work presents a hybrid solution, combining the benefits of both, namely a quaternion approach leveraging the Lagrangian framework, connecting the singularity-free parameterization with the algorithmic simplicity of the Lagrangian approach. We do so by offering detailed insights into the kinematic modeling process and the formulation of the dynamics of a general aerial manipulator. The obtained dynamics model is validated experimentally against a real-time physics engine. A practical application of the obtained dynamics model is shown in the context of a computed torque feedback controller (feedback linearization), where we analyze its real-time capability with increasingly complex models.