 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Lightweight Universal Gripper with Low Activation Force for Aerial Grasping
Paper and Code
Aug 23, 2022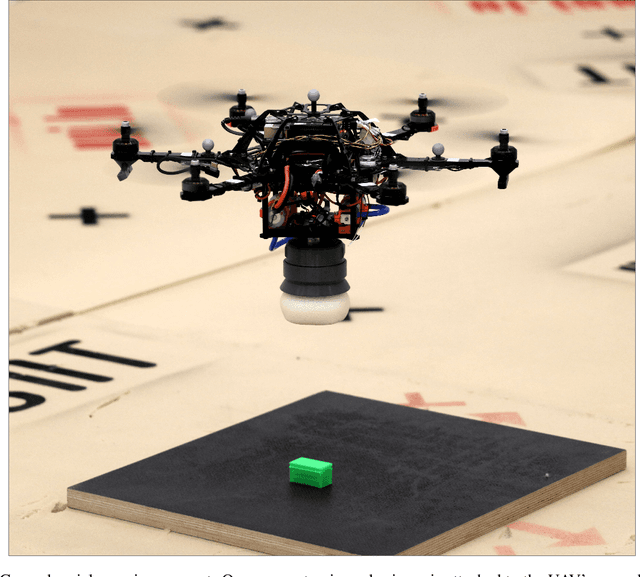
Soft robotic grippers have numerous advantages that address challenges in dynamic aerial grasping. Typical multi-fingered soft grippers recently showcased for aerial grasping are highly dependent on the direction of the target object for successful grasping. This study pushes the boundaries of dynamic aerial grasping by developing an omnidirectional system for autonomous aerial manipulation. In particular, the paper investigates the design, fabrication, and experimental verification of a novel, highly integrated, modular, sensor-rich, universal jamming gripper specifically designed for aerial applications. Leveraging recent developments in particle jamming and soft granular materials, the presented gripper produces a substantial holding force while being very lightweight, energy-efficient and only requiring a low activation force. We show that the holding force can be improved by up to 50% by adding an additive to the membrane's silicone mixture. The experiments show that our lightweight gripper can develop up to 15N of holding force with an activation force as low as 2.5N, even without geometric interlocking. Finally, a pick and release task is performed under real-world conditions by mounting the gripper onto a multi-copter. The developed aerial grasping system features many useful properties, such as resilience and robustness to collisions and the inherent passive compliance which decouples the UAV from the environment.